网上常看到的用法:
R1 = tfs.euler.euler2mat(alpha,beta,gamma) # alpha,beta,gamma是旋转角度这种调用默认的是绕着物体上与基坐标系平行的坐标系旋转的,顺序是“x-y-z”,完整的写法是:
R1 = tfs.euler.euler2mat(alpha,beta,gamma, 'sxyz')这里第四个参数的可选项为:文章来源:https://www.toymoban.com/news/detail-540905.html
'sxyz', 'sxyx', 'sxzy',
'sxzx', 'syzx', 'syzy',
'syxz', 'syxy', 'szxy',
'szxz', 'szyx', 'szyz',
'rzyx', 'rxyx', 'ryzx',
'rxzx', 'rxzy', 'ryzy',
'rzxy', 'ryxy', 'ryxz',
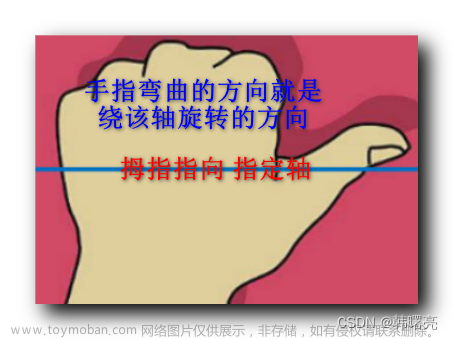
'rzxz', 'rxyz', 'rzyz'.个人理解,这里的“s”表示的是“static”,即绕静坐标系(基坐标系)旋转;“r”表示“relative”,即相对坐标系(物体的连体坐标系)。因此“r”开头的才是机器人学中学的欧拉角。。。文章来源地址https://www.toymoban.com/news/detail-540905.html
到了这里,关于python transforms3d,不同旋转方式与对应的旋转矩阵的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!