前言
作者第一次参加电赛,也是第一次接触OpenMV,通过几天的学习完成了对车库以及边线巡线的视觉识别方案,分享出来希望能提供一些思路给其他使用OpenMV的朋友。
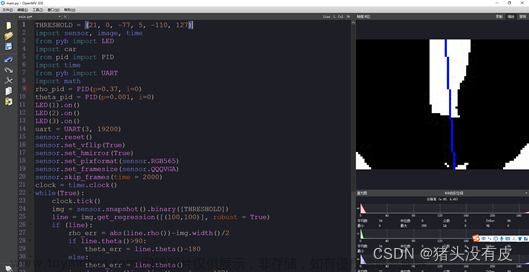
效果展示
车库T型连接处识别:

巡线的效果忘记截图了,不过代码里有,感兴趣的朋友可以跑一下试试。
识别思路
本项目主要使用了OpenMV提供的find_blobs()函数,具体的使用方法可以查看官方教程。
通过对被场地上黑线分割出来的白色区域进行识别,可以简单有效的识别出车库接缝。首先提取画面中所有的色块,将画面平均分为上下两个部分,以分类上下两种色块。当未到达车库连接处时,画面中仅有一条黑线,画面将被分割为上下两个部分,上下各一块。当画面中出现车库接缝时,将被分割为上面两块,下面一块,通过对上下色块数量的检测,即可简单有效的识别出车库接缝。通过计算经过车库接缝的数量,并使用当前接缝坐标进行校准,即可确认小车当前的准确位置。
巡线部分将画面左侧较窄的部分提取了roi,同时提取黑线色块,并返回其中心坐标供单片机进行闭环,确保在行进过程中与车库距离保持恒定。文章来源:https://www.toymoban.com/news/detail-541224.html
完整代码
import sensor, image, time, pyb
# 串口通信
uart = pyb.UART(3,115200,timeout_char = 1000)#串口初始化
threshold1 = (80, 200)#阈值
threshold2 = (0, 40)#阈值
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # 关闭增益(色块识别时必须要关)
sensor.set_auto_whitebal(False) # 关闭白平衡
clock = time.clock()#定义时钟对象clock
# 串口输出变量
out_str1 = ''
T_time = 0
real_time = 0
now_T = False
line_roi = (0,50,40,240)
while(True):
#clock.tick()#返回以毫秒计的通电后的运行时间。
img = sensor.snapshot().lens_corr(1.5)
blob_up = []
blob_down = []
largest_blob = []
line_blob=img.find_blobs([threshold2], roi=line_roi, merge=True,pixels_area=50)
if line_blob:#如果找到了颜色块
# Find the blob with the most pixels.
largest_blob.append(max(line_blob, key=lambda b: b.pixels()))
# 绘制色块边缘会影响到之后的识别,调参结束请注释
img.draw_rectangle(largest_blob[0].rect())#画矩形框 blob.rect() ---> 返回一个矩形元组(可当作roi区域)
img.draw_cross(largest_blob[0].cx(), largest_blob[0].cy())#画十字 blob.cx(), blob.cy() --->返回中心点x和y坐标
#img.find_blobs()查找图像中所有色块,并返回包含每个色块的色块对象列表
for blob in img.find_blobs([threshold1], pixels_threshold=200, area_threshold=200, merge=True):
#若一个色块的边界框区域小于 area_threshold ,则会被过滤掉。
#若一个色块的像素数小于 pixel_threshold ,则会被过滤掉。
#merge_cb 可设置为用以调用两个即将合并的色块的函数,以禁止或准许合并。
img.draw_rectangle(blob.rect())#画矩形框 blob.rect() ---> 返回一个矩形元组(可当作roi区域)
img.draw_cross(blob.cx(), blob.cy())#画十字 blob.cx(), blob.cy() --->返回中心点x和y坐标
if blob.cy() >120:
blob_down.append(blob)
else:
blob_up.append(blob)
#检测T
if len(blob_up) == 2 and len(blob_down) == 1:
now_T = True
#print('T')
else:
now_T = False
#判断过了几个T
if now_T == True:
real_time+=1 #滤波
if real_time==5:
T_time+=1
else:
real_time=0
out_str1 += 's'; # 校验用,可以注释掉
out_str1 += '%.d' % int(now_T); # 当前是否有T
out_str1 += '%.d' % int(T_time); # T个数
if largest_blob:
out_str1 += '%.d' % int(largest_blob[0].cy()); # 与车库距离,用来巡线
# 发送
uart.write(out_str1)
print(now_T)
print(out_str1);
# 串口数组清零
out_str1 = '' # 清除之前的数据
#print(clock.fps())#clock.fps() ---> 停止追踪运行时间,并返回当前FPS(必须先调用tick)。
如果文章有帮助到你,请给我点个赞,谢谢!文章来源地址https://www.toymoban.com/news/detail-541224.html
到了这里,关于OpenMV 2022电赛泊车视觉方案的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!