1.3472能提供红,绿,蓝色(RGB)和清晰光感应值的数字输出
2.它通过 I2C协议通讯。
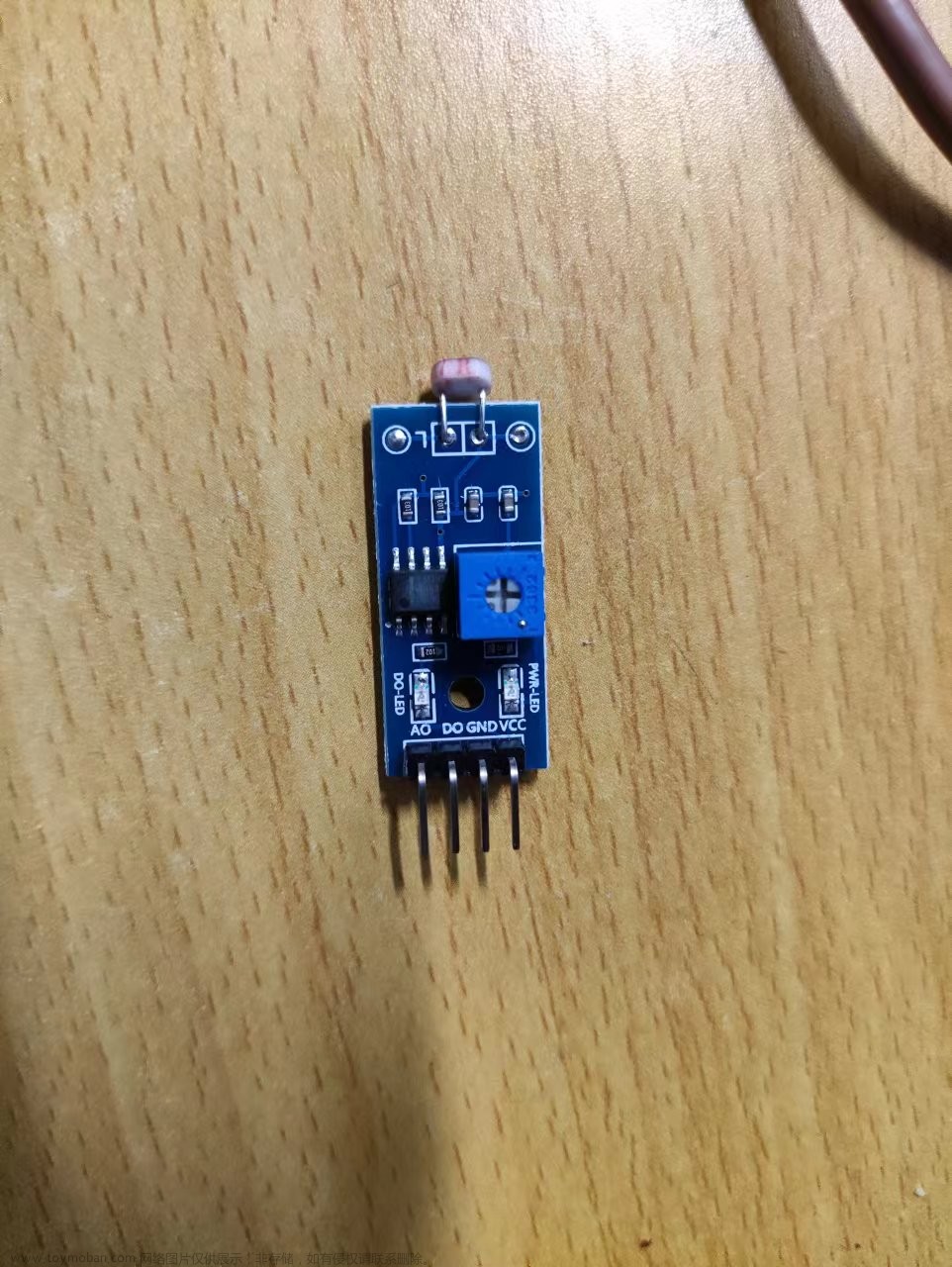
3.最好选择带led灯的版本,自带的led低电平能关闭。
4.这边VIN接5V电压输入,GND接GND,SCL接SCL(PF1)SDA接SDA(PF0),这边根据自己启动的IO口进行变换


5.我这边采用STM32Cube生成使用硬件I2C的方式进行通信,注意这边有7bit和10bit,默认7bit

6.这边注意最好设置成上拉模式,防止某些设备没有上拉
7.点击生成后打开Keil5开始编辑代码;先了解一下HAL库如何写入和读取I2C 设备的吧
可以看到Hal_i2c库里面提供了轮询,中断,DMA的方式进行读写I2C,这边我们使用轮询的方式进行读取TCS3472

8.首先新建一个.H文件,把TCS3472的一写配置文件编写进行,我这边也是拷贝别人的,代码如下:
介绍一下函数:
1.void SwicthI2c(char sw); //这个我是用来切换不同I2C 接口的,跟实际使用没有影响
2.unsigned char TCS34725_Init(void); //这是用来初始化TCS34725芯片的
3.char TCS34725_GetRawData(COLOR_RGBC *rgbc);//这个是用来读取RGBC的参数值
4.void RGBtoHSL(COLOR_RGBC *Rgb, COLOR_HSL *Hsl);//这个是将读取到的RGBC值转换为HSL色盘
5.void RGBto255RGB(COLOR_RGBC *Rgb,Sepan_RGBC *RGB255);//这部分计算RGB的占比以255:255:255呈现和Lux值
6.double calculateColorTemperature(COLOR_RGBC *Rgb);//这部分是计算色温
#ifndef __TCS3472ColourSensor_H
#define __TCS3472ColourSensor_H
#include "usart.h"
#include "stdio.h"
#include "cmsis_os.h"
#include "i2c.h"
/******************************************************************************/
#define TCS34725_ADDRESS (0x29)
#define TCS34725_COMMAND_BIT (0x80)
#define TCS34725_ENABLE (0x00)
#define TCS34725_ENABLE_AIEN (0x10) /* RGBC Interrupt Enable */
#define TCS34725_ENABLE_WEN (0x08) /* Wait enable - Writing 1 activates the wait timer */
#define TCS34725_ENABLE_AEN (0x02) /* RGBC Enable - Writing 1 actives the ADC, 0 disables it */
#define TCS34725_ENABLE_PON (0x01) /* Power on - Writing 1 activates the internal oscillator, 0 disables it */
#define TCS34725_ATIME (0x01) /* Integration time */
#define TCS34725_WTIME (0x03) /* Wait time (if TCS34725_ENABLE_WEN is asserted) */
#define TCS34725_WTIME_2_4MS (0xFF) /* WLONG0 = 2.4ms WLONG1 = 0.029s */
#define TCS34725_WTIME_204MS (0xAB) /* WLONG0 = 204ms WLONG1 = 2.45s */
#define TCS34725_WTIME_614MS (0x00) /* WLONG0 = 614ms WLONG1 = 7.4s */
#define TCS34725_AILTL (0x04) /* Clear channel lower interrupt threshold */
#define TCS34725_AILTH (0x05)
#define TCS34725_AIHTL (0x06) /* Clear channel upper interrupt threshold */
#define TCS34725_AIHTH (0x07)
#define TCS34725_PERS (0x0C) /* Persistence register - basic SW filtering mechanism for interrupts */
#define TCS34725_PERS_NONE (0b0000) /* Every RGBC cycle generates an interrupt */
#define TCS34725_PERS_1_CYCLE (0b0001) /* 1 clean channel value outside threshold range generates an interrupt */
#define TCS34725_PERS_2_CYCLE (0b0010) /* 2 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_3_CYCLE (0b0011) /* 3 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_5_CYCLE (0b0100) /* 5 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_10_CYCLE (0b0101) /* 10 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_15_CYCLE (0b0110) /* 15 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_20_CYCLE (0b0111) /* 20 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_25_CYCLE (0b1000) /* 25 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_30_CYCLE (0b1001) /* 30 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_35_CYCLE (0b1010) /* 35 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_40_CYCLE (0b1011) /* 40 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_45_CYCLE (0b1100) /* 45 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_50_CYCLE (0b1101) /* 50 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_55_CYCLE (0b1110) /* 55 clean channel values outside threshold range generates an interrupt */
#define TCS34725_PERS_60_CYCLE (0b1111) /* 60 clean channel values outside threshold range generates an interrupt */
#define TCS34725_CONFIG (0x0D)
#define TCS34725_CONFIG_WLONG (0x02) /* Choose between short and long (12x) wait times via TCS34725_WTIME */
#define TCS34725_CONTROL (0x0F) /* Set the gain level for the sensor */
#define TCS34725_ID (0x12) /* 0x44 = TCS34721/TCS34725, 0x4D = TCS34723/TCS34727 */
#define TCS34725_STATUS (0x13)
#define TCS34725_STATUS_AINT (0x10) /* RGBC Clean channel interrupt */
#define TCS34725_STATUS_AVALID (0x01) /* Indicates that the RGBC channels have completed an integration cycle */
#define TCS34725_CDATAL (0x14) /* Clear channel data */
#define TCS34725_CDATAH (0x15)
#define TCS34725_RDATAL (0x16) /* Red channel data */
#define TCS34725_RDATAH (0x17)
#define TCS34725_GDATAL (0x18) /* Green channel data */
#define TCS34725_GDATAH (0x19)
#define TCS34725_BDATAL (0x1A) /* Blue channel data */
#define TCS34725_BDATAH (0x1B)
#define TCS34725_INTEGRATIONTIME_2_4MS 0xFF /**< 2.4ms - 1 cycle - Max Count: 1024 */
#define TCS34725_INTEGRATIONTIME_24MS 0xF6 /**< 24ms - 10 cycles - Max Count: 10240 */
#define TCS34725_INTEGRATIONTIME_50MS 0xEB /**< 50ms - 20 cycles - Max Count: 20480 */
#define TCS34725_INTEGRATIONTIME_101MS 0xD5 /**< 101ms - 42 cycles - Max Count: 43008 */
#define TCS34725_INTEGRATIONTIME_154MS 0xC0 /**< 154ms - 64 cycles - Max Count: 65535 */
#define TCS34725_INTEGRATIONTIME_240MS 0x9C /**< 240ms - 100 cycles - Max Count: 65535 */
#define TCS34725_INTEGRATIONTIME_700MS 0x00 /**< 700ms - 256 cycles - Max Count: 65535 */
#define TCS34725_GAIN_1X 0x00 /**< No gain */
#define TCS34725_GAIN_4X 0x01 /**< 4x gain */
#define TCS34725_GAIN_16X 0x02 /**< 16x gain */
#define TCS34725_GAIN_60X 0x03 /**< 60x gain */
/******************************************************************************/
typedef struct{
unsigned short c; //[0-65536]
unsigned short r;
unsigned short g;
unsigned short b;
}COLOR_RGBC;//RGBC
typedef struct{
unsigned char r; //[0-255]
unsigned char g;
unsigned char b;
unsigned short Lux;
}Sepan_RGBC;//RGBC
typedef struct{
unsigned short h; //[0,360]
unsigned char s; //[0,100]
unsigned char l; //[0,100]
}COLOR_HSL;//HSL
#define max3v(v1, v2, v3) ((v1)<(v2)? ((v2)<(v3)?(v3):(v2)):((v1)<(v3)?(v3):(v1)))
#define min3v(v1, v2, v3) ((v1)>(v2)? ((v2)>(v3)?(v3):(v2)):((v1)>(v3)?(v3):(v1)))
void SwicthI2c(char sw);
unsigned char TCS34725_Init(void);
char TCS34725_GetRawData(COLOR_RGBC *rgbc);
void RGBtoHSL(COLOR_RGBC *Rgb, COLOR_HSL *Hsl);
void RGBto255RGB(COLOR_RGBC *Rgb,Sepan_RGBC *RGB255);
double calculateColorTemperature(COLOR_RGBC *Rgb);
#endif
9.好的,接下来我们来介绍.C文件和各个函数如何实现的
#include "TCS3472ColourSensor.h"
COLOR_RGBC rgb;
COLOR_HSL hsl;
/*
PB6 ------> I2C1_SCL
PB7 ------> I2C1_SDA
PF0 ------> I2C2_SDA
PF1 ------> I2C2_SCL
*/
I2C_HandleTypeDef *I2cx;
void SwicthI2c(char sw)
{
if(sw==2)I2cx=&hi2c2;
else I2cx=&hi2c1;
}
char TCS34725_Read(uint8_t subAddr,unsigned char *dataBuffer, uint16_t bytesNumber)
{
subAddr |= TCS34725_COMMAND_BIT;
uint8_t sendadd = (TCS34725_ADDRESS << 1) | 0x00;
if(HAL_I2C_Master_Transmit(I2cx,sendadd,&subAddr,1,1000)==0x00)
{
sendadd = (TCS34725_ADDRESS << 1) | 0x01;
if(HAL_I2C_Master_Receive(I2cx,sendadd,dataBuffer,bytesNumber,1000)==0x00)
{
return 1;
}
}
return 0;
}
char TCS34725_Write(uint8_t subAddr,uint8_t *dataBuffer,uint16_t bytesNumber)
{
uint8_t sendadd = (TCS34725_ADDRESS << 1) | 0x00;
uint8_t sendBuffer[10]={0,};
sendBuffer[0]=subAddr|TCS34725_COMMAND_BIT;
for(uint8_t i=1;i<=bytesNumber;i++)
{
sendBuffer[i]=dataBuffer[i-1];
}
if(HAL_I2C_Master_Transmit(I2cx,sendadd,sendBuffer,bytesNumber+1,1000)==0)
{
return 1;
}
return 0;
}
void TCS34725_SetIntegrationTime(uint8_t time)
{
TCS34725_Write(TCS34725_ATIME,&time,1);
}
void TCS34725_SetGain(uint8_t gain)
{
TCS34725_Write(TCS34725_CONTROL, &gain, 1);
}
void TCS34725_Enable(void)
{
uint8_t cmd = TCS34725_ENABLE_PON;
TCS34725_Write(TCS34725_ENABLE, &cmd, 1);
cmd = TCS34725_ENABLE_PON | TCS34725_ENABLE_AEN;
TCS34725_Write(TCS34725_ENABLE, &cmd, 1);
}
unsigned char TCS34725_Init(void)
{
unsigned char id=0;
uint16_t number=0;
uint8_t status = TCS34725_STATUS_AVALID;
TCS34725_Read(TCS34725_ID,&id,1);
printf("Read I2C ID:%02X\r\n",id);
if(id==0x4D || id ==0x44)
{
TCS34725_SetIntegrationTime(TCS34725_INTEGRATIONTIME_154MS);//转换时间
// TCS34725_SetIntegrationTime(TCS34725_INTEGRATIONTIME_50MS);
TCS34725_SetGain(TCS34725_GAIN_16X);
TCS34725_Enable();
return 1;
}
return 0;
}
/*******************************************************************************
* @brief TCS34725获取单个通道数据
*
* @return data - 该通道的转换值
*******************************************************************************/
uint16_t TCS34725_GetChannelData(uint8_t reg)
{
uint8_t tmp[2] = {0,0};
uint16_t data;
TCS34725_Read(reg, tmp, 2);
data = (tmp[1] << 8) | tmp[0];
return data;
}
/*******************************************************************************
* @brief TCS34725获取各个通道数据
*
* @return 1 - 转换完成,数据可用
* 0 - 转换未完成,数据不可用
*******************************************************************************/
char TCS34725_GetRawData(COLOR_RGBC *rgbc)
{
uint8_t status = TCS34725_STATUS_AVALID;
TCS34725_Read(TCS34725_STATUS, &status, 1);
if(status & TCS34725_STATUS_AVALID)
{
rgbc->c = TCS34725_GetChannelData(TCS34725_CDATAL);
rgbc->r = TCS34725_GetChannelData(TCS34725_RDATAL);
rgbc->g = TCS34725_GetChannelData(TCS34725_GDATAL);
rgbc->b = TCS34725_GetChannelData(TCS34725_BDATAL);
return 1;
}
return 0;
}
/******************************************************************************/
//RGB转HSL
void RGBtoHSL(COLOR_RGBC *Rgb, COLOR_HSL *Hsl)
{
uint8_t maxVal,minVal,difVal;
uint8_t r = Rgb->r*100/Rgb->c; //[0-100]
uint8_t g = Rgb->g*100/Rgb->c;
uint8_t b = Rgb->b*100/Rgb->c;
maxVal = max3v(r,g,b);
minVal = min3v(r,g,b);
difVal = maxVal-minVal;
//计算亮度
Hsl->l = (maxVal+minVal)/2; //[0-100]
if(maxVal == minVal)//若r=g=b,灰度
{
Hsl->h = 0;
Hsl->s = 0;
}
else
{
//计算色调
if(maxVal==r)
{
if(g>=b)
Hsl->h = 60*(g-b)/difVal;
else
Hsl->h = 60*(g-b)/difVal+360;
}
else
{
if(maxVal==g)Hsl->h = 60*(b-r)/difVal+120;
else
if(maxVal==b)Hsl->h = 60*(r-g)/difVal+240;
}
//计算饱和度
if(Hsl->l<=50)Hsl->s=difVal*100/(maxVal+minVal); //[0-100]
else
Hsl->s=difVal*100/(200-(maxVal+minVal));
}
}
/******************************************************************************/
//计算RGB的比例和Lux
void RGBto255RGB(COLOR_RGBC *Rgb,Sepan_RGBC *RGB255)
{
double maxVal,minVal,difVal;
double r_255=0.0,g_255=0.0,b_255=0.0;
r_255 = (double)Rgb->r/Rgb->c*255;
g_255 = (double)Rgb->g/Rgb->c*255;
b_255 = (double)Rgb->b/Rgb->c*255;
maxVal = max3v(r_255,g_255,b_255);
r_255 = r_255/maxVal*255;
g_255 = g_255/maxVal*255;
b_255 = b_255/maxVal*255;
// maxVal = max3v(Rgb->r,Rgb->g,Rgb->b);
// r_255 = (double)Rgb->r/maxVal*255;
// g_255 = (double)Rgb->g/maxVal*255;
// b_255 = (double)Rgb->b/maxVal*255;
RGB255->r = (unsigned char)r_255;
RGB255->g = (unsigned char)g_255;
RGB255->b = (unsigned char)b_255;
double lux=(0.299*Rgb->r)+(0.587*Rgb->g)+(0.114*Rgb->b);
RGB255->Lux = (unsigned short)lux;
if(RGB255->r==255&&RGB255->g==255&&RGB255->b==255)
{
if(Rgb->c<255)
{
RGB255->r = 0;
RGB255->g = 0;
RGB255->b = 0;
}
}
}
//
//计算CCT色温
double calculateColorTemperature(COLOR_RGBC *Rgb)
{
double trimX = 0;
double trimY = 0;
double trimZ = 0;
double coorX = 0, coorY = 0;
double CCT = 0;
double n = 0;
int R = Rgb->r;//255;
int G = Rgb->g;//231;
int B = Rgb->b;//131;
//以下公式实现RGB转三刺激值
trimX = 2.789 * R + 1.7517 * G + 1.1302 * B;
trimY = 1 * R + 4.5907 * G + 0.0601 * B;
trimZ = 0 * R + 0.0565 * G + 5.5943 * B;
//以下公式实现三刺激值转色坐标
coorX = trimX / (trimX + trimY + trimZ);
coorY = trimY / (trimX + trimY + trimZ);
n = (coorX - 0.3320) / (0.1858 - coorY);
//以下公式实现色坐标转色温
CCT = 437 * n * n * n + 3601 * n * n + 6831 * n + 5517;
return CCT;
}
10.main函数调用应该不用多讲了吧
printf("I2C2 PF0->I2C2_SDA;PF1-> I2C2_SCL \r\n");
SwicthI2c(2);
TCS34725_Init();
osDelay(500);//这边是需要等待传感器自己转换完成的
TCS34725_GetRawData(&rgb);
RGBtoHSL(&rgb,&hsl);
RGBto255RGB(&rgb,&rgb_255A);
printf("R=%d G=%d B=%d C=%d\r\n",rgb.r,rgb.g,rgb.b,rgb.c);
printf("H=%d S=%d L=%d\r\n",hsl.h,hsl.s,hsl.l);
printf("R255=%d G255=%d B255=%d Lux=%dCCT:%f\r\n",rgb_255A.r,rgb_255A.g,rgb_255A.b,rgb_255A.Lux,calculateColorTemperature(&rgb));
printf("---------------------------------------------\r\n");11.测试结果如下:
 文章来源:https://www.toymoban.com/news/detail-545992.html
文章来源:https://www.toymoban.com/news/detail-545992.html
文章来源地址https://www.toymoban.com/news/detail-545992.html
到了这里,关于STM32读取TCS3472颜色传感器读取RGB颜色和色温值和Lux的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!