STM32_串口中断接收数据_空闲中断
引言:
1、串口中断接收数据首先要保证完整性(设置串口中断优先级)
2、串口中断接收数据要保证实时性(打开串口空闲中断——空闲时间是2个字节的时间)
3、串口中断接收+DMA缓存,等到需要处理时候在进行处理数据
方法一:直接利用stm32的RXNE和IDLE中断进行接收不定字节数据
实现思路:利用串口数据中断接收数据,利用串口空闲中断来判断一帧数据是否接收完成
使用场景:可以使用在简单的接收指令数据,但是每接收一个字节都会进入中断,所以在接收大量数据的时候不推荐使用
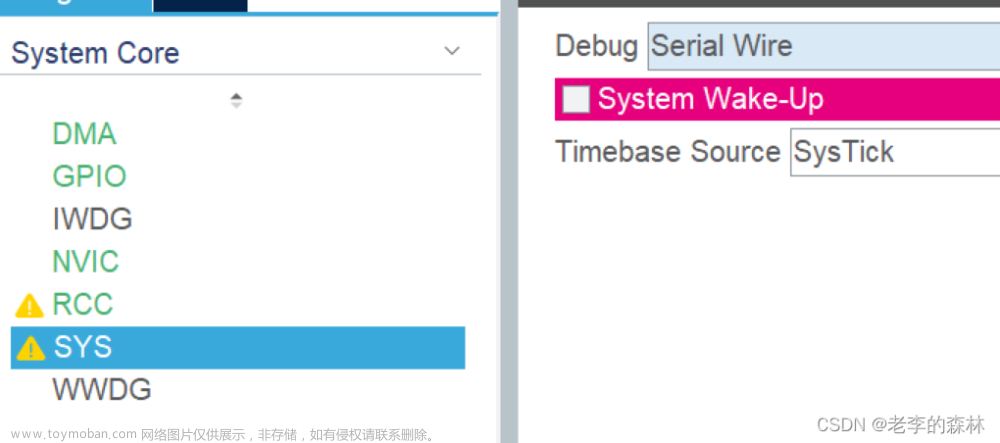
注意:配置空闲中断文章来源:https://www.toymoban.com/news/detail-546685.html
/****************************************************************************
* 名 称:void USART1_Configuration(void)
* 功 能:配置USART1参数
* 入口参数:
* 出口参数:无
* 说 明:
* 调用方法:无
****************************************************************************/
void USART1_Configuration(void)
{
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //USART1 TX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //A端口
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //USART1 RX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //复用开漏输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //A端口
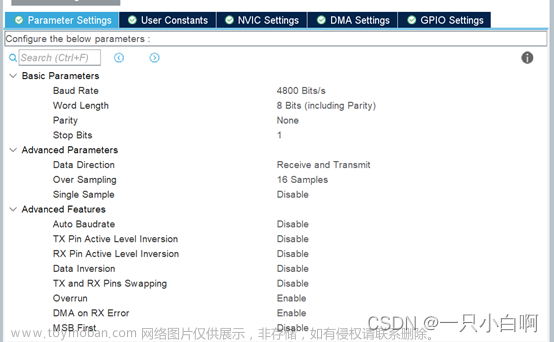
USART_InitStructure.USART_BaudRate = USART_BAUDRATE; //波特率250000bps
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位8位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位1位
USART_InitStructure.USART_Parity = USART_Parity_No; //无校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //配置串口参数函数
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能接收中断
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE); //空闲中断
USART_Cmd(USART1, ENABLE); //使能 USART1
}
void USART1_IRQHandler(void) //串口1 中断服务程序
{
uint8_t Clear = 0;
/*如果接收到一字节数据*/
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //判断读寄存器是否非空
{
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除中断标志
printf("#"); //接收到一字节数据
}
/*如果接收到一帧数据*/
if(USART_GetITStatus(USART1,USART_IT_IDLE) != RESET)
{
Clear = USART1->SR;
Clear = USART1->DR; //清除IDLE标志
printf("@"); //接收一帧数据
}
}
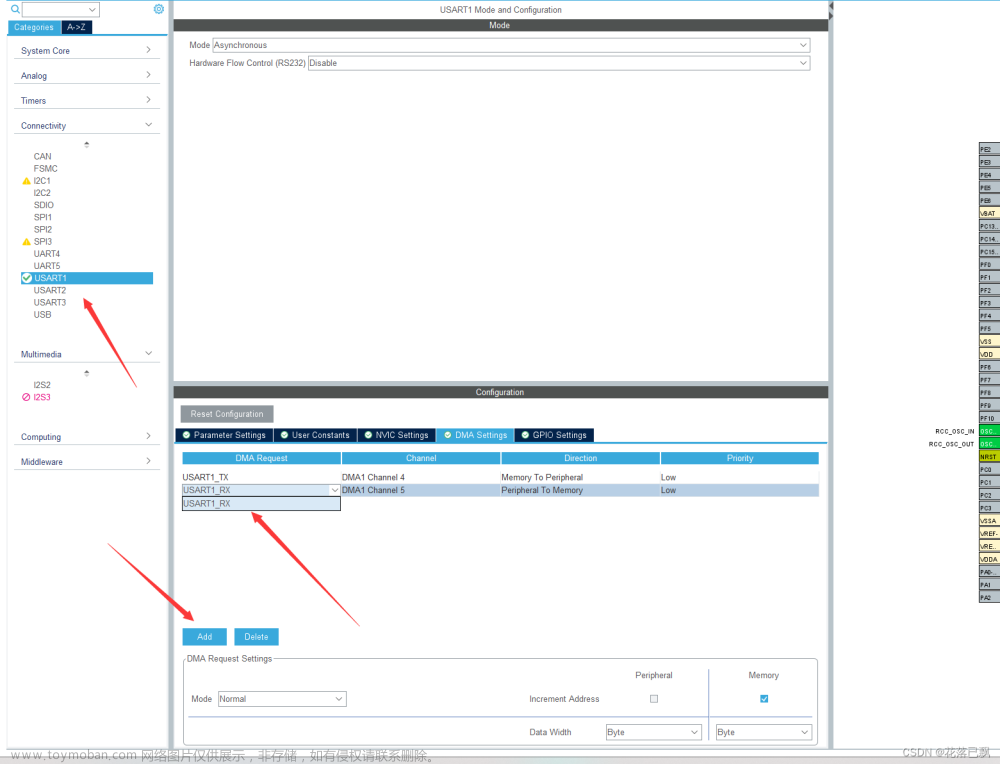
方法二:DMA接收+IDLE中断
实现方法:配置成空闲中断IDLE模式且使能DMA接收,并同时设置接收缓冲区和初始化DMA,假设这帧数据长度是200个字节,那么在单片机接收到一个字节的时候并不会产生串口中断,而是DMA在后台把数据默默地搬运到你指定的缓冲区里面。当整帧数据发送完毕之后串口才会产生一次中断,此时可以利用DMA_GetCurrDataCounter();函数计算出本次的数据接受长度,从而进行数据处理。
应用对象:适用于各种串口相关的通信协议,如:MODBUS,PPI ;还有类似于GPS数据接收解析,串口WIFI的数据接收等,都是很好的应用对象。文章来源地址https://www.toymoban.com/news/detail-546685.html
void uart_init(u32 bound);
void MYDMA_Enable(DMA_Channel_TypeDef*DMA_CHx);
#endif
usart.C
//初始化IO 串口1
//bound:波特率
void uart_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE); //使能 USART1,GPIOA时钟
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); //使能DMA传输
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//使能USART2时钟
USART_DeInit(USART1); //复位串口1
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
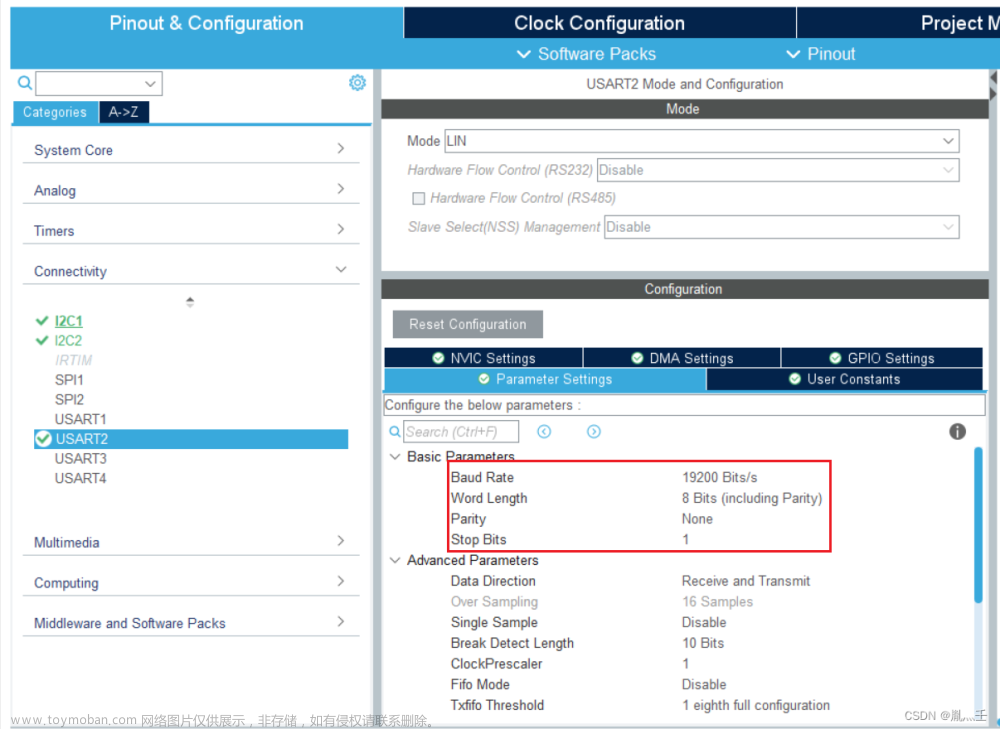
USART_InitStructure.USART_BaudRate = bound;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl =USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);//开启空闲中断
USART_DMACmd(USART1,USART_DMAReq_Rx,ENABLE); //使能串口1 DMA接收
USART_Cmd(USART1, ENABLE); //使能串口
//相应的DMA配置
DMA_DeInit(DMA1_Channel5); //将DMA的通道5寄存器重设为缺省值 串口1对应的是DMA通道5
DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)&USART1->DR; //DMA外设usart基地址
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)DMA_Rece_Buf; //DMA内存基地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //数据传输方向,从外设读取发送到内存
DMA_InitStructure.DMA_BufferSize = DMA_Rec_Len; //DMA通道的DMA缓存的大小
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设地址寄存器不变
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //内存地址寄存器递增
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; //数据宽度为8位
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; //数据宽度为8位
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; //工作在正常缓存模式
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium; //DMA通道 x拥有中优先级
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //DMA通道x没有设置为内存到内存传输
DMA_Init(DMA1_Channel5, &DMA_InitStructure); //根据DMA_InitStruct中指定的参数初始化DMA的通道
DMA_Cmd(DMA1_Channel5, ENABLE); //正式驱动DMA传输
}
//重新恢复DMA指针
void MYDMA_Enable(DMA_Channel_TypeDef*DMA_CHx)
{
DMA_Cmd(DMA_CHx, DISABLE ); //关闭USART1 TX DMA1所指示的通道
DMA_SetCurrDataCounter(DMA_CHx,DMA_Rec_Len);//DMA通道的DMA缓存的大小
DMA_Cmd(DMA_CHx, ENABLE); //打开USART1 TX DMA1所指示的通道
}
//发送len个字节
//buf:发送区首地址
//len:发送的字节数
void Usart1_Send(u8 *buf,u8 len)
{
u8 t;
for(t=0;t<len;t++) //循环发送数据
{
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
USART_SendData(USART1,buf[t]);
}
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
}
//串口中断函数
void USART1_IRQHandler(void) //串口1中断服务程序
{
if(USART_GetITStatus(USART1, USART_IT_IDLE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
USART_ReceiveData(USART1);//读取数据注意:这句必须要,否则不能够清除中断标志位。
Usart1_Rec_Cnt = DMA_Rec_Len-DMA_GetCurrDataCounter(DMA1_Channel5); //算出接本帧数据长度
//***********帧数据处理函数************//
printf ("Thelenght:%d\r\n",Usart1_Rec_Cnt);
printf ("The data:\r\n");
Usart1_Send(DMA_Rece_Buf,Usart1_Rec_Cnt);
printf ("\r\nOver! \r\n");
//*************************************//
USART_ClearITPendingBit(USART1,USART_IT_IDLE); //清除中断标志
MYDMA_Enable(DMA1_Channel5); //恢复DMA指针,等待下一次的接收
}
}
到了这里,关于STM32_串口中断接收数据_空闲中断的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!