第四章 电感式传感器
变磁阻电感式(自感式)
基本原理
由线圈、铁芯、衔铁三部分组成,在铁芯和衔铁之间有气隙,传感器的运动部分和衔铁相连。
衔铁移动时,气隙厚度发生变化,引起磁路的磁阻变化,从而导致线圈电感发生变化。
通过测量电感量的变化确定位移的大小和方向。
通常气隙磁阻远大于铁芯和衔铁的磁阻。
变磁阻式传感器可以分为变气隙厚度和变气隙面积两种,前者使用比较广泛。
灵敏度:单位气隙厚度变化引起的电感量的变化。
变气隙电感式传感器的测量范围与灵敏度及线性度相矛盾,因此变气隙电感式传感器适用于测量微小位移的场合。
输出特性
输入输出为非线性关系
- 灵敏度
衔铁上移:斜率变大,灵敏度增加。
衔铁下移:斜率变小,灵敏度降低。 - 线性度
衔铁上移和下移时非线性都将增大。
为了减小非线性误差,常采用差动变气隙电感式传感器。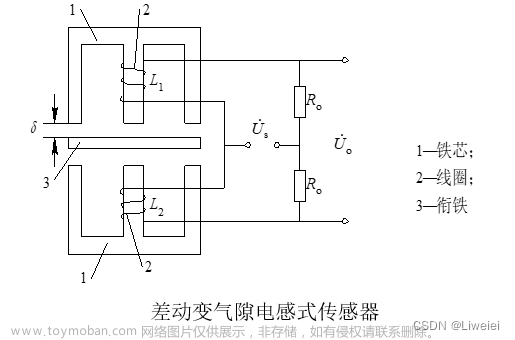
- 单线圈式和差动式相比较
- 差动式变气隙电感传感器的灵敏度是单圈式的两倍。
- 差动式的线性度得到明显改善。
测量电路
测量电路有交流电桥式、变压器式交流电桥、谐振式
交流电桥式:
变压器式交流电桥:
- 当衔铁位于中间位置时,输出为0
- 衔铁上下移动相同距离时,输出电压相位相反,大小随衔铁的位移而变化。
- 输出无法判断位移方向,需要相敏检波电路。
变磁阻式应用
变气隙电感式压力传感器
当压力进入膜盒时,膜盒顶端在压力P的作用下产生与压力大小成正比的位移,因而衔铁发生位移,从而导致气隙发生变化。
变气隙差动压力传感器
当压力作用于C型弹簧时,弹簧产生形变,带动衔铁运动。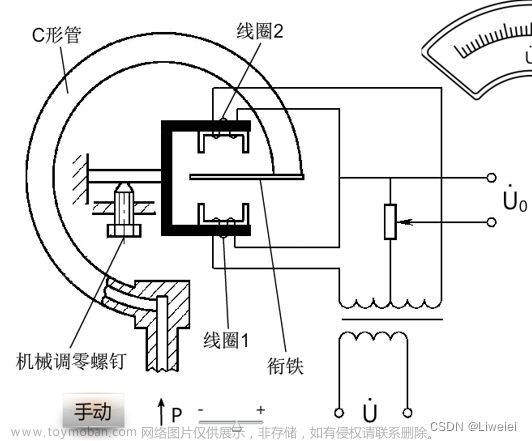
差动变气隙厚度电感测微仪

差动变压器式(互感式)
把被测量的变化转化为线圈互感变化
次级绕阻用差动式连接
差动变压器电感式传感器的结构形式:变隙式、变面积式、螺线管式
应用最多的是螺线管式差动变压器,可以测量1-100mm机械位移
变隙差动变压器电感式传感器
原理
两个初级绕阻同名端顺向串联,两个次级绕组同名端反向串联
- 没有位移时,衔铁处于平衡位置,输出为0
- 有位移时,输出不为0,电压的大小与机型反应被测物体位移的大小和方向
输出特性
- 输出电压与衔铁位移量Δδ/δ0成正比
- 变隙式差动变压器灵敏度K表达式

输出电压与位移关系曲线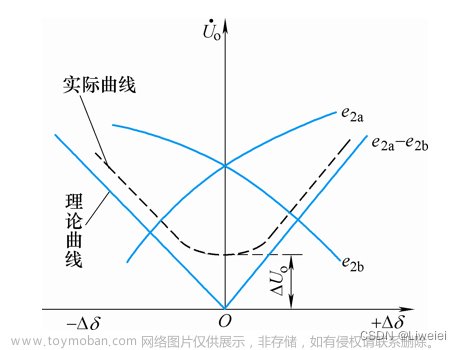
结论:
- 电源要稳定,获取稳定的输出特性,并且电源幅值的适当提高可以提高灵敏度K
- 增加N2/N1的值或者减小δ0都可以提高灵敏度K
- 忽略铁损和线圈中分布电容
- 传感器实际输出特性存在零点残余电压
零点残余电压主要是由传感器的两次级绕阻的电气参数和几何尺寸不对称以及磁性材料的非线性等引起的。主要有基波和高次谐波组成。其大小通常在几十毫伏以下。
零点残余电压的消除方法:
- 保证传感器的几何尺寸、绕组线圈电气参数和磁路的对称
- 采用适当的测量电路

螺线管差动变压器电感式传感器
工作原理
两个次级线圈反向串联,

输出特性
当衔铁位于中心位置时,输出电压并不为0,此时输出电压为零点残余电压ΔUo,造成了实际特性与理论特性不完全一致。
差动变压器式传感器测量电路
- 问题:
- 输出为交流i按压,只能反映位移大小,不能反映方向。
- 测量值中包含零点残余电压。
- 方法:采用差动整流电路和相敏检波电路。
差动整流电路:把差动变压器的两个次级输出电压分别整流,然后将整流后的电压或电流差值输出。

差动变压器式传感器应用
用于测量位移和与位移有关的任何机械量,如震动、加速度、应变、张力、厚度
微压传感器
有压力作用时,衔铁发生位移。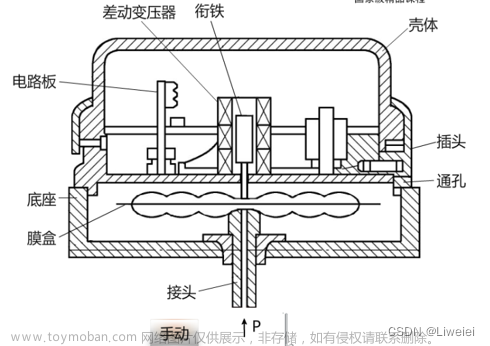
加速度传感器
位移与被测加速度成正比,使加速度转变为位移的测量。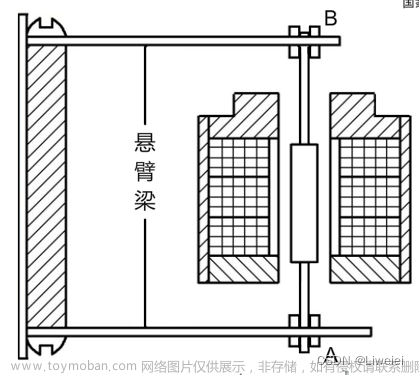
电涡流电感式
根据电涡流效应制成的传感器。
电涡流只集中在金属导体的表面,这一现象称为趋肤效应
工作原理
线圈阻抗的变化完全取决于被测金属导体的电涡流效应
法拉第电磁感应定律和楞次定律
根据法拉第电磁感应定律,当传感器线圈通以正弦交变电流I1时,线圈周围空间必然产生正弦交变磁场H1,使置于此磁场中的金属导体中感应电涡流I2,I2又产生新的交变磁场H2。
根据愣次定律, H2的作用将反抗原磁场H1,由于磁场H2的作用,涡流要消耗一部分能量,导致传感器线圈的等效阻抗发生变化。

基本特性

根据电涡流在导体内的贯穿情况和激励信号的频率高低,可分为高频反射式、低频透射式。
电涡流传感器测量电路
包括调频式、调幅式。
调频式电路
当传感器与被测导体距离x改变时,在涡流的影响下,传感器的电感变化,导致真到频率变化
调幅式电路
金属导体远离线圈时,回路阻抗最大,谐振回路上输出电压也最大。 文章来源:https://www.toymoban.com/news/detail-547778.html
文章来源:https://www.toymoban.com/news/detail-547778.html
电涡流式传感器应用
位移、振幅、转速、无损探伤 文章来源地址https://www.toymoban.com/news/detail-547778.html
文章来源地址https://www.toymoban.com/news/detail-547778.html
到了这里,关于传感器原理与检测技术复习笔记第四章-电感式传感器的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!