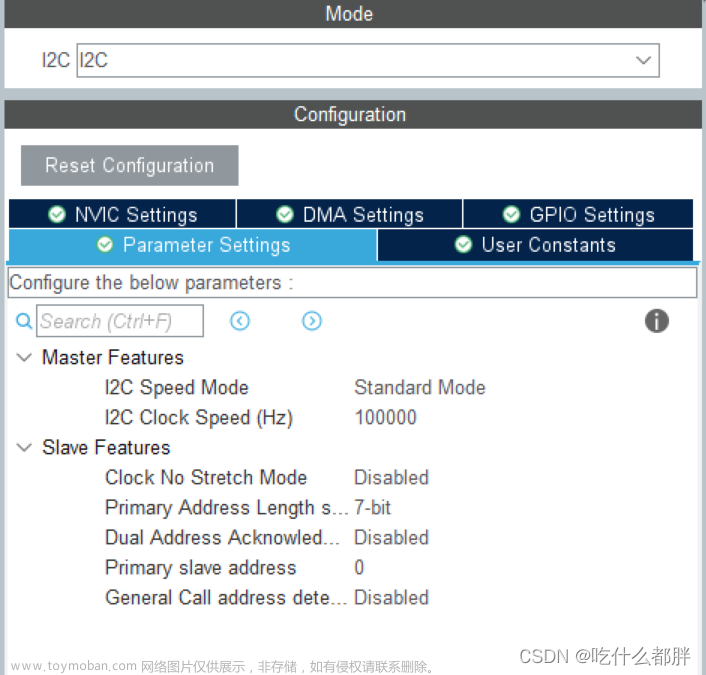
简介:STM32F103C8T6驱动ADXL345三轴倾斜度传感器源码介绍。
开发平台:KEIL ARM
MCU型号:STM32F103C8T6
传感器型号:ADXL345
特别提示:驱动内可能使用了某些其他组件,比如delay等,在文末外设模板下载地址内有。
1积分源码下载地址在文末!!!
接口图:

使用举例:
#include <stdio.h>
#include "ADXL345.h"
int main()
{
float angleX, angleY, angleZ;
ADXL345_init(); // 初始化
while(1) {
delayMs(1000);
get_angle(&angleX, &angleY, &angleZ); // 获取三轴偏移角度
printf("angle X:%f Y:%f Z:%f\n", angleX, angleY, angleZ);
}
}驱动源码:
IIC.c
#include "main.h"
#define IIC_SDA_PORT GPIOA
#define IIC_SDA_CLK (RCC_APB2Periph_GPIOA)
#define IIC_SDA_PIN GPIO_Pin_5
#define IIC_SCL_PORT GPIOA
#define IIC_SCL_CLK (RCC_APB2Periph_GPIOA)
#define IIC_SCL_PIN GPIO_Pin_6
#define IIC_SCL_OUT_1 IIC_SCL_PORT->BSRR = (uint32_t)IIC_SCL_PIN // 置1
#define IIC_SCL_OUT_0 IIC_SCL_PORT->BRR = (uint32_t)IIC_SCL_PIN
#define IIC_SDA_OUT_1 IIC_SDA_PORT->BSRR = (uint32_t)IIC_SDA_PIN // 置1
#define IIC_SDA_OUT_0 IIC_SDA_PORT->BRR = (uint32_t)IIC_SDA_PIN
#define IIC_SDA_IN() ((IIC_SDA_PORT->IDR & IIC_SDA_PIN) != 0)
/**
* @brief IIC延时
* @param None
* @retval None
*/
static void IIC_Delay(void)
{
uint8_t i;
/*
下面的时间是通过逻辑分析仪测试得到的。
工作条件:CPU主频72MHz ,MDK编译环境,1级优化
循环次数为10时,SCL频率 = 205KHz
循环次数为7时,SCL频率 = 347KHz, SCL高电平时间1.5us,SCL低电平时间2.87us
循环次数为5时,SCL频率 = 421KHz, SCL高电平时间1.25us,SCL低电平时间2.375us
*/
for (i = 0; i < 10; i++);
}
/**
* @brief SDA输出方向配置
* @param None
* @retval None
*/
void Set_IIC_SDA_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(IIC_SDA_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin=IIC_SDA_PIN;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_OD;
GPIO_Init(IIC_SDA_PORT,&GPIO_InitStructure);
}
/**
* @brief SDA输入方向配置
* @param None
* @retval None
*/
void Set_IIC_SDA_IN(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(IIC_SDA_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin=IIC_SDA_PIN;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_Init(IIC_SDA_PORT,&GPIO_InitStructure);
}
/**
* @brief 模拟IIC初始化
* @param None
* @retval None
*/
void IIC_init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(IIC_SDA_CLK | IIC_SCL_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = IIC_SDA_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(IIC_SDA_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = IIC_SCL_PIN;
GPIO_Init(IIC_SCL_PORT, &GPIO_InitStructure);
IIC_stop();
}
/**
* @brief 模拟IIC起始信号
* @param None
* @retval None
*/
void IIC_start()
{
Set_IIC_SDA_OUT();
IIC_SCL_OUT_1;
IIC_SDA_OUT_1;
IIC_Delay();
IIC_SDA_OUT_0;
IIC_Delay();
IIC_SCL_OUT_0;
IIC_Delay();
}
/**
* @brief 模拟IIC停止信号
* @param None
* @retval None
*/
void IIC_stop()
{
Set_IIC_SDA_OUT();
IIC_SCL_OUT_1;
IIC_SDA_OUT_0;
IIC_Delay();
IIC_SDA_OUT_1;
}
/**
* @brief 模拟IIC主机应答
* @param None
* @retval None
*/
void IIC_ack()
{
Set_IIC_SDA_OUT();
IIC_SDA_OUT_0;
IIC_Delay();
IIC_SCL_OUT_1;
IIC_Delay();
IIC_SCL_OUT_0;
IIC_Delay();
IIC_SDA_OUT_1;
}
/**
* @brief 模拟IIC主机不应答
* @param None
* @retval None
*/
void IIC_noack()
{
Set_IIC_SDA_OUT();
IIC_SDA_OUT_1;
IIC_Delay();
IIC_SCL_OUT_1;
IIC_Delay();
IIC_SCL_OUT_0;
IIC_Delay();
}
/**
* @brief 模拟IIC等待从机应答
* @param None
* @retval 1: 接收应答失败 0: 接收应答成功
*/
uint8_t IIC_wait_ack()
{
uint8_t rec = 0;
Set_IIC_SDA_OUT();
IIC_SDA_OUT_1;
IIC_Delay();
Set_IIC_SDA_IN();
IIC_SCL_OUT_1;
IIC_Delay();
rec = IIC_SDA_IN();
IIC_SCL_OUT_0;
IIC_Delay();
return rec;
}
/**
* @brief 模拟IIC发送一个字节
* @param None
* @retval None
*/
void IIC_send_byte(uint8_t txd)
{
uint8_t i=0;
Set_IIC_SDA_OUT();
for(i=0;i<8;i++)
{
if(txd&0x80) IIC_SDA_OUT_1;
else IIC_SDA_OUT_0;
IIC_Delay();
IIC_SCL_OUT_1;
IIC_Delay(); // 发送数据
IIC_SCL_OUT_0;
if(i == 7) IIC_SDA_OUT_1; // 最后一位数据发送完要释放SDA总线
txd <<= 1;
IIC_Delay();
}
}
/**
* @brief 模拟IIC读取一个字节
* @param ack: 0,读完不产生应答 1,读完产生应答
* @retval 返回读取到的字节
*/
uint8_t IIC_read_byte(uint8_t ack)
{
uint8_t i,receive=0;
Set_IIC_SDA_IN();
for(i=0;i<8;i++)
{
receive <<= 1;
IIC_SCL_OUT_1;
IIC_Delay();
if(IIC_SDA_IN()) receive++; // 连续读取八位
IIC_SCL_OUT_0;
IIC_Delay();
}
if(!ack) IIC_noack();
else IIC_ack();
return receive; // 返回读取到的字节
}IIC.h
#ifndef __IIC_H
#define __IIC_H
#include "main.h"
void Set_IIC_SDA_OUT(void);
void Set_IIC_SDA_IN(void);
void IIC_init(void);
void IIC_start(void);
void IIC_stop(void);
void IIC_ack(void);
void IIC_noack(void);
uint8_t IIC_wait_ack(void);
void IIC_send_byte(uint8_t txd);
uint8_t IIC_read_byte(uint8_t ack);
#endif
ADXL345.c
/*
ADXL345三轴倾斜度模块
*/
#include "ADXL345.h"
#include "IIC.h"
/**
* @brief ADXL345初始化
* @param None
* @retval None
*/
uint8_t ADXL345_init(void)
{
IIC_init();
if(ADXL345_read_reg(DEVICE_ID) == 0xE5)
{
ADXL345_write_reg(DATA_FORMAT,0X0B); // 低电平中断输出,13位全分辨率,输出数据右对齐,16g量程
ADXL345_write_reg(BW_RATE,0x0E); // 数据输出速度为100Hz
ADXL345_write_reg(POWER_CTL,0x08); // 链接使能,测量模式,省电特性
ADXL345_write_reg(INT_ENABLE,0x80); // 不使用中断
ADXL345_write_reg(OFSX,0x00);
ADXL345_write_reg(OFSY,0x00);
ADXL345_write_reg(OFSZ,0x05);
return 0;
}
return 1;
}
/**
* @brief ADXL345写寄存器
* @param None
* @retval None
*/
uint8_t ADXL345_write_reg(u8 addr,u8 val)
{
IIC_start();
IIC_send_byte(slaveaddress); // 发送写器件指令
if(IIC_wait_ack())
{
return 1;
}
IIC_send_byte(addr); // 发送寄存器地址
if(IIC_wait_ack())
{
return 2;
}
IIC_send_byte(val); // 发送值
if(IIC_wait_ack())
{
return 3;
}
IIC_stop(); // 产生一个停止条件
return 0;
}
/**
* @brief ADXL345读寄存器
* @param None
* @retval None
*/
u8 ADXL345_read_reg(u8 addr)
{
u8 temp=0;
IIC_start();
IIC_send_byte(slaveaddress); // 发送写器件指令
if(IIC_wait_ack())
{
return 1;
}
IIC_send_byte(addr); // 发送寄存器地址
if(IIC_wait_ack())
{
return 2;
}
IIC_start(); // 重新启动
IIC_send_byte(regaddress); // 发送读器件指令
if(IIC_wait_ack())
{
return 3;
}
temp=IIC_read_byte(0); // 读取一个字节,不继续再读,发送NAK
IIC_stop(); // 产生一个停止条件
return temp;
}
/**
* @brief ADXL345读取数据
* @param None
* @retval None
*/
void ADXL345_read_data(short *x,short *y,short *z)
{
u8 buf[6];
u8 i;
IIC_start();
IIC_send_byte(slaveaddress); // 发送写器件指令
IIC_wait_ack();
IIC_send_byte(0x32); // 发送寄存器地址(数据缓存的起始地址为0X32)
IIC_wait_ack();
IIC_start(); // 重新启动
IIC_send_byte(regaddress); // 发送读器件指令
IIC_wait_ack();
for(i=0;i<6;i++)
{
if(i==5)buf[i]=IIC_read_byte(0); // 读取一个字节,不继续再读,发送NACK
else buf[i]=IIC_read_byte(1); // 读取一个字节,继续读,发送ACK
}
IIC_stop(); // 产生一个停止条件
*x=(short)(((u16)buf[1]<<8)+buf[0]); // 合成数据
*y=(short)(((u16)buf[3]<<8)+buf[2]);
*z=(short)(((u16)buf[5]<<8)+buf[4]);
}
/**
* @brief ADXL345连读读取几次取平均值
* @param None
* @retval None
*/
void ADXL345_read_average(short *x,short *y,short *z,u8 times)
{
u8 i;
short tx,ty,tz;
*x=0;
*y=0;
*z=0;
if(times)//读取次数不为0
{
for(i=0;i<times;i++)//连续读取times次
{
ADXL345_read_data(&tx,&ty,&tz);
*x+=tx;
*y+=ty;
*z+=tz;
DELAYClass.DelayMs(5);
}
*x/=times;
*y/=times;
*z/=times;
}
}
/**
* @brief ADXL345计算角度
* @param None
* @retval None
*/
void get_angle(float *x_angle,float *y_angle,float *z_angle)
{
short ax,ay,az;
ADXL345_read_average(&ax,&ay,&az,10);
*x_angle=atan(ax/sqrt((az*az+ay*ay)))*180/3.14;
*y_angle=atan(ay/sqrt((ax*ax+az*az)))*180/3.14;
*z_angle=atan(sqrt((ax*ax+ay*ay)/az))*180/3.14;
}
ADXL345.h
#ifndef __ADXL345_H
#define __ADXL345_H
#include "main.h"
#define X_AXLE 0 //x轴
#define Y_AXLE 1 //y轴
#define Z_AXLE 2 //z轴
#define slaveaddress 0xA6 //定义器件在IIC总线中的从地址,根据ALT ADDRESS地址引脚不同修改
// ALT ADDRESS引脚接地时地址为0xA6,接电源时地址为0x3A
#define THRESH_TAP 0X1D //敲击中断阈值(用于正常敲击检测)
// 16g模式中,62.5mg/Bit
#define OFSX 0X1E //X轴偏移寄存器 15.6mg/Bit 0xff = 4g
#define OFSY 0X1F //X轴偏移寄存器 15.6mg/Bit 0xff = 4g
#define OFSZ 0X20 //X轴偏移寄存器 15.6mg/Bit 0xff = 4g
#define DUR 0x21 //敲击阈值时间 625uS/Bit
#define LATENT 0X22 //敲击事件到时间窗口的延迟时间,在此期间
// 可检测第二次敲击时间 1.25mg/Bit
#define WINDOW 0X23 //敲击窗口,延迟时间满后的时间量,在此期间
// 能开始进行第二次有效敲击 1.25mg/Bit
#define THRESH_ACT 0X24 //检测活动的阈值,活动事件的幅度与该寄存器
// 的值进行比较 62.5mg/Bit
#define THRESH_INACT 0X25 //检测静止的阈值,静止事件的幅度与该寄存器
// 的值进行比较 62.5mg/Bit
#define TIME_INACT 0X26 //加速度时间量小于该寄存器的值表示静止 1S/Bit
#define ACT_INACT_CTL 0X27
//Bit 7,3 ACT交流/直流[INACT交流/直流]:0选择直流耦合;1使能交流耦合 直流时将
// 当前加速度值直接与THRESH_ACT和THRESH_INACT
// 进行比较,确定检测到的是活动还是静止
// 6,2 ACT_X使能[INACT_X使能]:设置为1,使能X轴参与检测活动或静止;活动检测时,
// 所有轴为逻辑"或",有任意轴超过阈值时,活动功能触发
// 禁止检测时,所有轴为逻辑"与",只有当所有轴低于阈值
// 时,静止功能触发
// 5,1 ACT_Y使能[INACT_Y使能]:与X轴类似
// 4,0 ACT_Z使能[INACT_Z使能]:与X轴类似
#define THRESH_FF 0X28 //阈值,用于自由落体检测,所有轴加速度与该寄存器值比较
// ,以确定是否发生自由落体 62.5mg/Bit,建议300mg与600mg之间
#define TIME_FF 0X29 //维持THRESH_FF阈值的最小时间,以生成自由落体中断 5mS/Bit
#define TAP_AXES 0X2A
// Bit 7:4 0
// 3 抑制 两次敲击之间出现大于THRESH_TAP值得加速度,设置抑制会抑制双击检测
// 2 TAP_X使能 设置为1时,使能X轴进行敲击检测,0时排除该轴的敲击检测
// 1 TAP_Y使能 设置为1时,使能Y轴进行敲击检测,0时排除该轴的敲击检测
// 0 TAP_Z使能 设置为1时,使能Z轴进行敲击检测,0时排除该轴的敲击检测
#define ACT_TAP_STATUS 0X2B /*只读寄存器*/
// Bit 7 0
// 6,2 ACT_X来源,TAP_X来源:表示涉及敲击或活动事件的第一轴,设置为1时,对应事件参与
// 设置为0时,对应未参与.不会自动清零,新数据覆盖,中断清零前
// 应读取该寄存器
// 5,1 ACT_Y来源,TAP_Y来源:与X相似
// 4,0 ACT_Z来源,TAP_Z来源:与X相似
// 3 休眠设置为1时,器件进入休眠状态
#define BW_RATE 0X2C
// Bit 7:5 0
// 4 LOW_POWER 低功耗位,0选择正常模式,1进入低功耗模式
// 3:0 速率位
#define POWER_CTL 0X2D
// Bit 7,6 0
// 5 链接 设置1时,延迟活动开始,直到检测到静止.检测到活动后,禁止检测开始,活动
// 检测停止,设置时动态链接活动和静止交替检测;设置0时静止与活动同时检测
// 4 AUTO_SLEEP 设置1时自动休眠,检测出静止后,进行休眠模式,活动使能后被唤醒
// 3 测量 0待机 1测量模式
// 2 休眠 0普通 1休眠
// 1,0 唤醒(休眠模式下的读取频率) "00":8HZ "01":4HZ "10":2HZ "11":1HZ
#define INT_ENABLE 0X2E //中断使能配置
// Bit 7 DATA_READY
// 6 SINGLE_TAP
// 5 DOUBLE_TAP
// 4 Activity
// 3 Inactivity
// 2 FREE_FALL 自由落体中断
// 1 Watermark
// 0 Overrun
#define INT_MAP 0X2F //中断映射 自读寄存器
//位与INT_ENABLE对应,,设置为0,该中断映射到INT1引脚;设置为1,该中断映射到INT2引脚
#define INT_SOURCE 0X30 //中断来源
//位与INT_ENABLE对应,1表示该功能触发
#define DATA_FORMAT 0X31
// Bit 7 SELF_TEST 设置1,自测力应用至传感器,造成输出数据转换;0时禁用自测力
// 6 SPI 1设置为3线SPI模式,0时设置4线SPI模式
// 5 INT_INVERT 0时中断高电平有效,1时低电平有效
// 4 0
// 3 FULL_RES 1时设置全分辨率模式,输出以4mg/Bit增加;0时为10位模式
// 2 Justify 1为左对齐模式;8为右对齐模式,并带有符号扩展
// 1:0 范围位 "00"±2g "01"±4g "10"±8g "11"±16g
#define DATAX0 0X32
#define DATAX1 0X33 //与DATAX0组成x轴输出数据(二进制补码),DATAX1为高位,4mg/Bit
#define DATAY0 0X34
#define DATAY1 0X35 //与DATAY0组成Y轴输出数据(二进制补码),DATAY1为高位,4mg/Bit
#define DATAZ0 0X36
#define DATAZ1 0X37 //与DATAZ0组成Z轴输出数据(二进制补码),DATAZ1为高位,4mg/Bit
#define FIFO_CTL 0X38
// Bit 7,6 FIFO_MODE "00" 旁路模式
// "01" FIFO模式 可收集最多32个值,然后停止收集数据
// "10" 流模式 FIFO保存最后32个数据值,FIFO满时,新数据覆盖最早数据(先进先出)
// "11" 触发器 通过触发位触发,FIFO在触发事件前保存最后的数据样本,然后
// 继续收集数据直到填满;填满后,不再收集新数据
// 5 触发位 0链接触发器模式下的触发事件至INT1,1链接至INT2
// 4:0 样本 功能取决于FIFO模式:FIFO模式时,指定触发水印中断需要的FIFO条目数
// 流模式时,指定触发水印中断需要的FIFO条目数
// 触发器模式:指定触发事件之前在FIFO缓冲区要保留的FIFO样本数
// 样本位设置为0时,不管哪种FIFO模式,立即在INT_SOURCE寄存器设置水印状态位
#define FIFO_STATUS 0X39 /*只读寄存器*/
// Bit 7 FIFO_TRIG FIFO_TRIG为1时表示有触发事件发生
// 6 0
// 5:0 条目位 报告FIFO存储的数据值的数量
//#define slaveaddress 0XA6//write
#define regaddress 0XA7//read
#define DEVICE_ID 0X00
uint8_t ADXL345_init(void);
u8 ADXL345_read_reg(u8 addr);
uint8_t ADXL345_write_reg(u8 addr,u8 val);
void ADXL345_read_data(short *x,short *y,short *z);
void ADXL345_read_average(short *x,short *y,short *z,u8 times);
void get_angle(float *x_angle,float *y_angle,float *z_angle);
#endif
驱动下载地址:
https://download.csdn.net/download/m0_50669075/87672763
STM32工程模板、外设模板、模块模板下载地址:文章来源:https://www.toymoban.com/news/detail-551498.html
stm32_template: STM32F103工程模板,外设模板,模块模板。模块模板包括:DHT11温湿度传感器,OLED屏幕,DS18B20温度传感器,DS1302时钟模块,红外测温模块,RFID模块,SIM900A短信模块,OneNET入网,ADXL345三轴传感器,离线语音识别模块,语音播报模块,甲醛传感器,PM2.5模块,SG90舵机,健康检测模块,消息队列示例,链表示例,分时调度系统示例等。文章来源地址https://www.toymoban.com/news/detail-551498.html
到了这里,关于STM32驱动ADXL345三轴传感器的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!