近期博主在阅读一些基于STM32的FOC代码中,对PWM占空比的设置问题很感兴趣,于是找了分别拿出来做了一下对比,来看看都是怎么来调整PWM输出的。
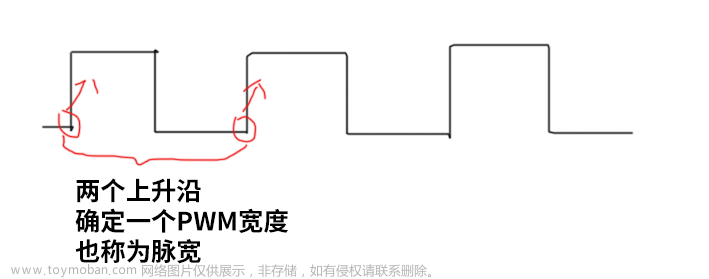
下图给出了PWM占空比调整的原理,在定时器循环中,有两个量:ARR 重装载值和 CCR 比较值。定时器内的计数器从0到ARR循环记录数据,通过设置比较值CCR,计数值小于CCR可输出高电平,大于CCR输出低电平,从而实现具有一定占空比的PWM信号从端口输出。从以上过程中可知,在计数器周期和CCR不变的情况下,改变CCR可以调整PWM信号占空比。

然后我们来看一看STM32CubeMX软件中对占空比的设置,在下图中通道4的Pulse值设为了1398,根据说明提示该值表示了PWM输出的比较值,那我们接下来从代码中找一找具体的设置。

使用STM32CubeMX生成芯片C语言代码,通过搜索可以发现,定时器初始函数中存在 sConfigOC.Pulse = 1398;代码。
void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 3-1;
htim1.Init.CounterMode = TIM_COUNTERMODE_CENTERALIGNED1;
htim1.Init.Period = 1400-1;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
sConfigOC.Pulse = 1398;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_4) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 3;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
HAL_TIM_MspPostInit(&htim1);
}在其他库函数中,也有改变占空比的设置,比如 TIM_SetCompare1(TIM2,Ta*PWM_Period);该函数的源代码如下,第二个参数被赋予给了定时器CCR值。
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1)
{
/* Check the parameters */
assert_param(IS_TIM_LIST8_PERIPH(TIMx));
/* Set the Capture Compare1 Register value */
TIMx->CCR1 = Compare1;
}在HAL库函数中,也采用 __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,Ta*PWM_Period);更改比较值,其代码如下,同样可以看到它更改了对应定时器的CCR值。文章来源:https://www.toymoban.com/news/detail-553261.html
#define __HAL_TIM_SET_COMPARE(__HANDLE__, __CHANNEL__, __COMPARE__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__HANDLE__)->Instance->CCR1 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__HANDLE__)->Instance->CCR2 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__HANDLE__)->Instance->CCR3 = (__COMPARE__)) :\
((__HANDLE__)->Instance->CCR4 = (__COMPARE__)))因此,以上各种函数方法都可以通过调整CCR值,更改PWM占空比。文章来源地址https://www.toymoban.com/news/detail-553261.html
到了这里,关于[FOC-Stm32]设置PWM占空比(比较值)的几种方法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!