简述
纵向DP主要实现在GriddedPathTimeGraph类里
modules\planning\tasks\optimizers\path_time_heuristic\gridded_path_time_graph.cc
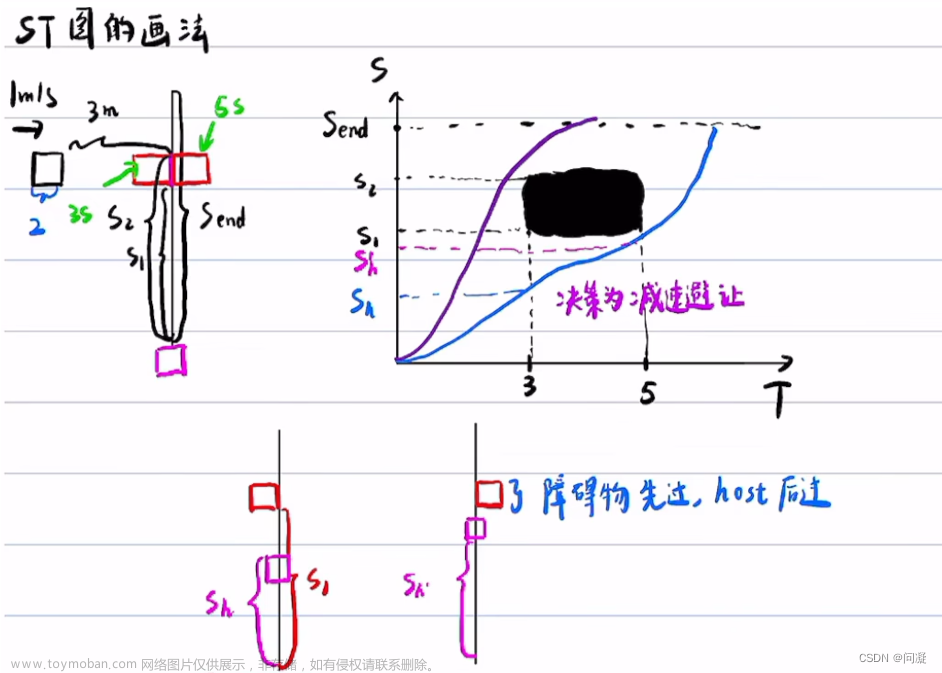
Apollo planning纵向DP即用动态规划的算法在ST图的可行域内求解出一个粗糙的速度规划,作为下一步QP平滑的基础。文章来源:https://www.toymoban.com/news/detail-555190.html
思维导图
 文章来源地址https://www.toymoban.com/news/detail-555190.html
文章来源地址https://www.toymoban.com/news/detail-555190.html
到了这里,关于Apollo自动驾驶planning纵向速度规划之DP详解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!