STM32单片机的PWM(脉冲宽度调制)电机控制
作者:公子易平
时间:2023/6/6
前段时间做一个智能小车的相关项目时,发现很少有人能够将STM32的PWM控制讲清楚,故而书此文,希望对后来的学习者有所帮助。
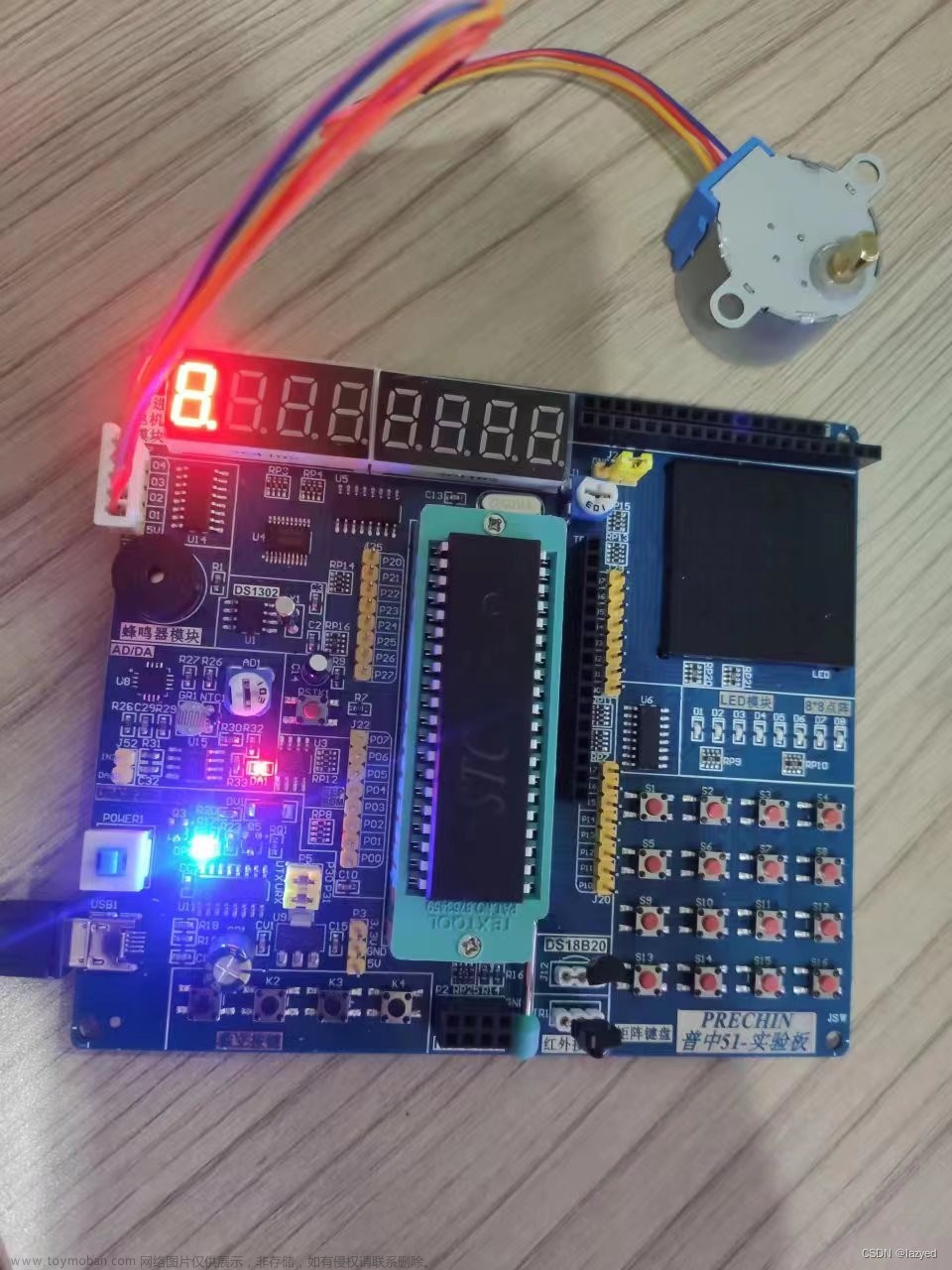
1.硬件介绍
- STM32F103C8T6最小系统板

-
直流TT电机

-
电机驱动芯片(TB6612)
-
-
杜邦线若干

接线情况:
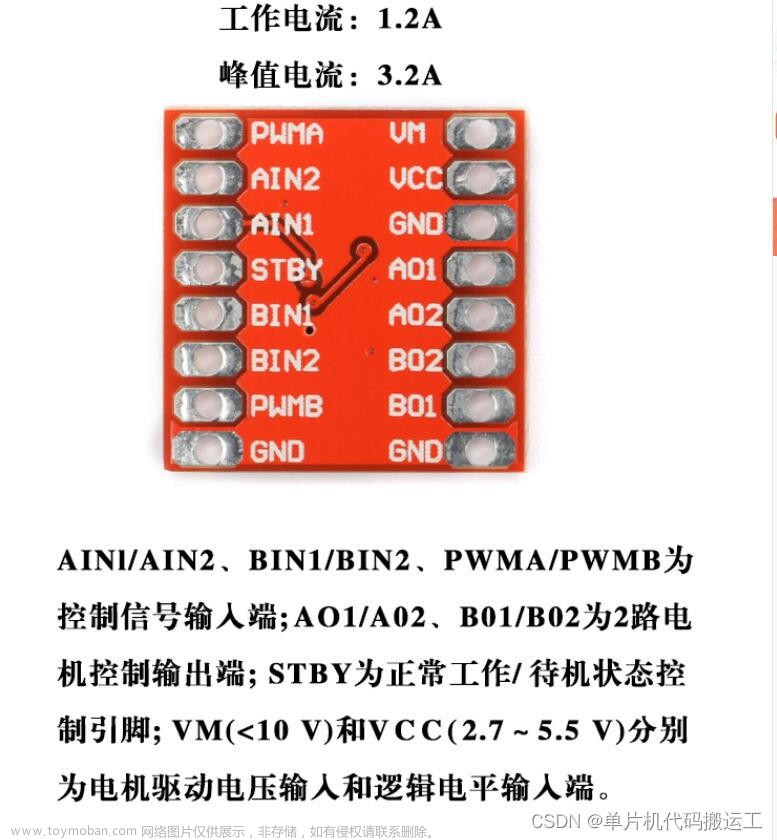
TB6612引脚说明:

STM32主控芯片与TB6612接线:
| STM32F103C8T6 | TB6612 |
|---|---|
| PA6 | PWMA |
| PA7 | PWMB |
| PB12 | AIN1 |
| PB13 | AIN2 |
| PB14 | BIN1 |
| PB15 | BIN2 |
TB6612其余接口:
| TB6612 | 接口 |
|---|---|
| VM | 7.4V |
| VCC | 3.3V |
| GND | GND |
| AO1&AO2 | A路电机正负极 |
| BO1&BO2 | B路电机正负极 |
| STBY | 3.3V |
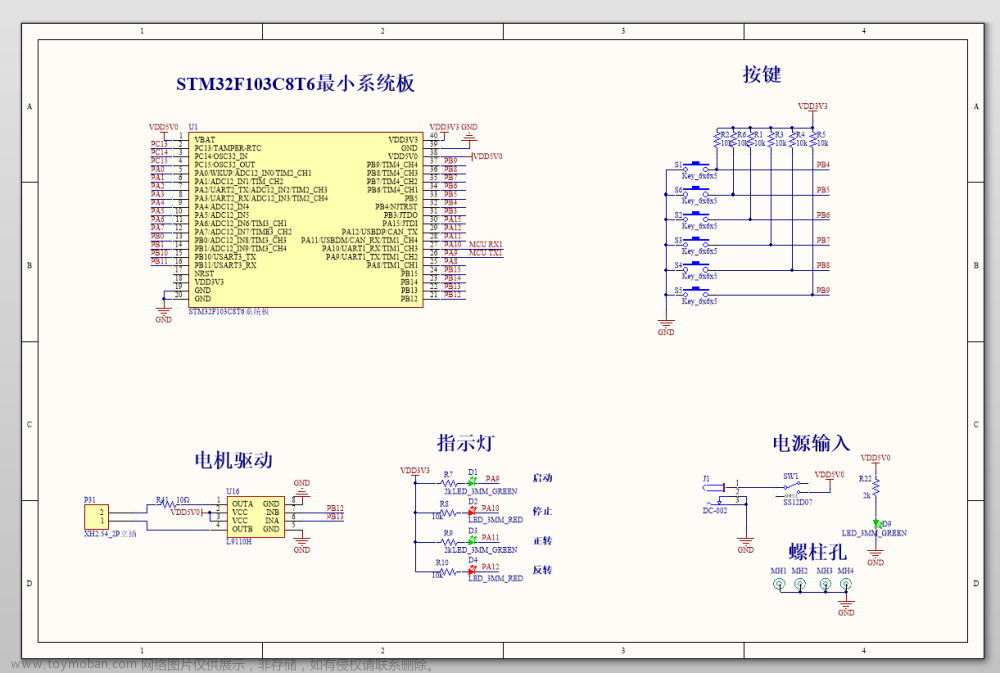
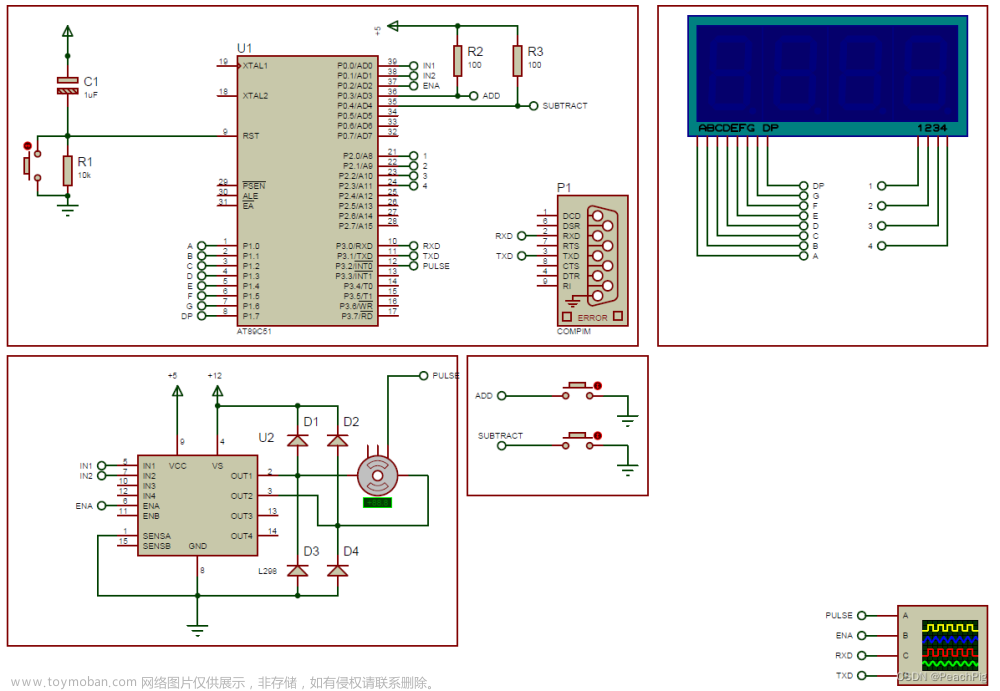
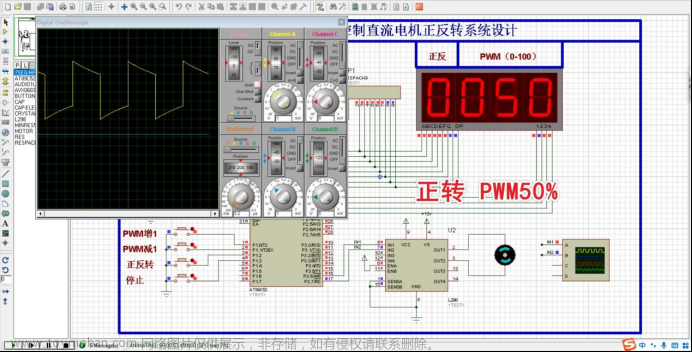
电路原理图如下,仅供参考: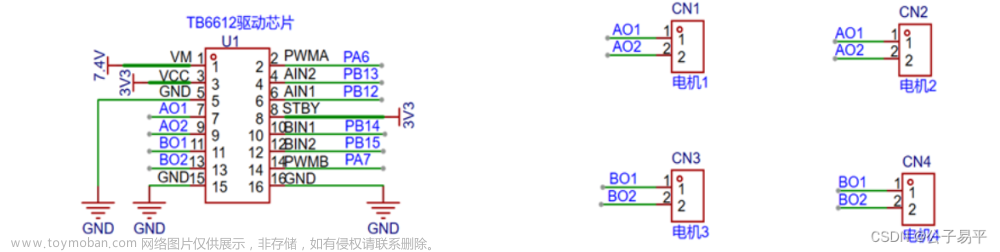
2.PWM控制原理
PWM即脉冲宽度调制(Pulse Width Modulation),常用PWM实现LED呼吸灯、直流电机调速以及舵机控制,本文重点介绍如何使用STM32单片机对直流电机进行调速控制。
2.1PWM控制的三个关键参数
PWM控制的三个关键参数为频率(Freq)、占空比(Duty)以及分辨率(Reso),其相关定义如下式所示。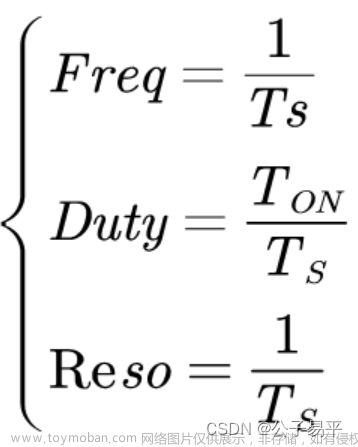
式中,Freq、Duty以及Reso分别表示PWM的频率、占空比和分辨率。Ts为一个PWM控制周期的总时间,Ton为一个PWM控制周期中高电平时间。式中分辨率和频率的定义一样但是单位不同,频率的单位是Hz,分辨率的单位是%。
需要重点关注的是占空比和分辨率两个参数。
- 占空比:
高电平的工作时间占一个周期的比例,可以理解高电平时间越长则电机转速越快,反之越慢。
(理想的认为占空比和电机的转速成正比例关系)
eg:
Duty=0% 电机不转
Duty=100% (在供电电压满足电机的额定电压时)电机达到最大转速
Duty=50%的电机转速大于Duty=30%的电机转速
- 分辨率:
表征PWM控制的精度的一个参数,即可以电机速度调节的步距(Step)的大小,分辨率越大,能够控制的占空比也就精度越高。
eg:
Reso=1%(1/100) 则电机的占空比可以为1% 2% 3%…100%,但是不能为3.5%;
Reso=0.1% (1/1000)则电机的占空比可以为0.1%、8.9%…,但是不能是90.678%。
2.2定时器关键参数
使用STM32单片机实现PWM控制时需要用到单片机上的TIM定时器外设,使用定时器的输出比较功能。
需要配置的定时器的关键参数亦有三个:预分频值PSC(Prescalar)、自动重装值ARR(AutoReload Register)以及输出比较值CCR(Capture /Compare Register)。
- PSC
对输入到定时器中的时钟进行分频,如果默认的输入时钟信号为72MHz,则PSC=0时,时钟信号不分频,定时器输入时钟信号为72MHz;PSC=1时,系统分频,定时器输入时钟信号为36MHz…
定时器的输入时钟信号=默认的输入时钟信号➗(PSC+1)
- ARR
当使用定时器时,每经过单位时间(时基单元决定),定时器中CNT计数单元就会加1,其上限值由寄存器的位数决定,为防止其无限增加,需要配置ARR值。ARR的作用是在CNT计数单元增加到ARR值时,CNT的值自动停止增加并返回到初始值。
实际上可以将这个过程看作给多个杯子加水的过程,每过一段时间就给一个杯子加固定体积的水,当一个杯子中的水装满之后,就给另一个新的杯子加水,而ARR自动重装值就相当于每个杯子的高度。
- CCR
其实CCR输出比较值可以简单的理解为一个分界线。
依旧是上面的例子,这次我们将杯子更具CCR分界线分成了上下两部分。下部分空间在遇到水之后会变成绿色,而上部分空间在遇到水之后会变成红色。
在单片机中将绿色想象成高电平,红色为低电平。则在一个计数的周期内,如果定时器的计数值CNT未到达CCR分界线,则水是绿色的,输出高电平给电机;当计数值CNT到达分界线CCR,则此时再向水杯中加水,颜色就会变成红色,即输出低电平给电机,而当水杯装满后,又需要给下一个水杯进行加水重复上述过程。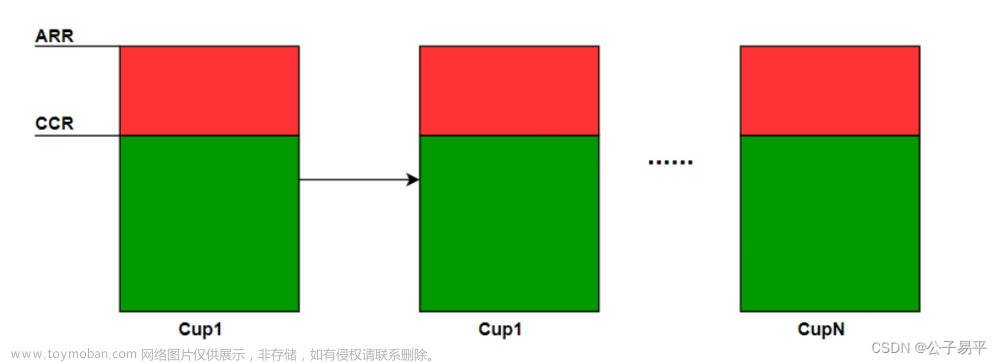
2.3PWM参数联系定时器参数
上文中已然描述了定时器的三个参数以及PWM控制的三个参数,最终的目的是将定时器的三个参数的配置和PWM控制的三个参数的控制联系起来。
其相互之间的联系的公式可以由下述公式进行描述:
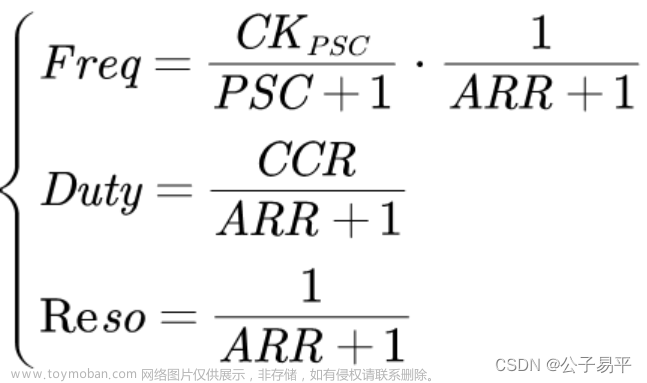
其中ARR值和CCR的值决定了PWM控制的占空比和分辨率。
下图所示为其原理图,PWM控制的工作过程为:
- 定时器工作,计数器值增加。
- 当计数器值N小于CCR时,输出电平V为高电平1。
- 当计数器值到达CCR时,输出电平V翻转为低电平0。
- 当计数器值大于CCR小于ARR时,输出电平持续为低电平0,计数值N继续增加。
- 当计数器值达到ARR时,计数值N回到初始状态,同时电平翻转,一个周期结束。
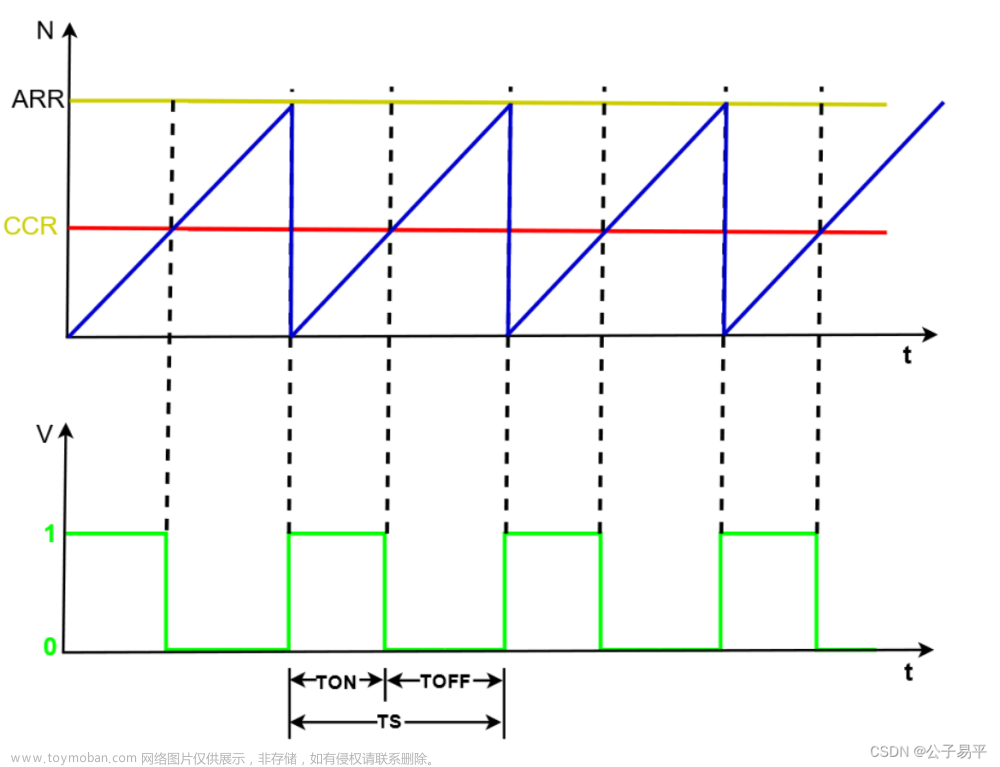
所以,PWM控制实际上就是通过不断的改变定时器的CCR值来改变占空比,从而实现对电机的调速。
3.软件设计
TB6612电机驱动芯片可以驱动两路电机,本次使用单片机定时器3的两个通道产生两路PWM波实现对电机的调速控制。以下是代码部分,使用Keil软件进行编写。
3.1定时器配置
#include "stm32f10x.h"//头文件
//初始化定时器TIM3 并配置PWM初始化参数
void PWM12_Init(void)
{ //开启TIM3和GPIOA的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//初始化GPIO口 PA6 PA7 用于产生PWM信号
GPIO_InitTypeDef GPIO_InitStructure;
//复用推挽输出模式因为复用了TIM3外设
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO A6 A7
//使用内部时钟
TIM_InternalClockConfig(TIM3);
//配置时基单元参数
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//定时器不分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数模式
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1;//ARR自动重装值
TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1;//PSC预分频值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//到达ARR触发一次中断 停止计数
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);//初始化单元
//输出比较结构体配置
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);//补全结构体中未配置参数
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//选择PWM模式1
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//输出比较极性选择
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//输出使能
TIM_OC1Init(TIM3, &TIM_OCInitStructure);//初始化 TIM3 OC1
TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能CCR1自动重装
TIM_OC2Init(TIM3, &TIM_OCInitStructure);//初始化 TIM3 OC2
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能CCR2自动重装
TIM_ARRPreloadConfig(TIM3,ENABLE);//开启预装载
TIM_Cmd(TIM3, ENABLE);//开启定时器3
TIM3->CCR1 = 0;//设置输出比较值
TIM3->CCR2 = 0;
}
//设置PWM1比较值 为Compare 即输出比较值
void PWM12_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1(TIM3, Compare);
}
//设置PWM2比较值 为Compare
void PWM12_SetCompare2(uint16_t Compare)
{
TIM_SetCompare2(TIM3, Compare);
}
3.2电机端口初始化
/******************************Motor电机模块**************************
电机初始化设置 以及电机PWM设置
*********************************************************************/
#include "stm32f10x.h" // Device header
#include "Timer.h"
void MotorAll_Init(void)
{
//开启电机驱动口的四个GPIO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13|GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
PWM12_Init();//开启定时器
}
//设置右路电机速度 PWM
void MotorR_SetSpeed(int8_t Speed)
{
if (Speed >= 0)//Speed值为正
{
GPIO_SetBits(GPIOB, GPIO_Pin_12);//电机正转
GPIO_ResetBits(GPIOB, GPIO_Pin_13);
PWM12_SetCompare1(Speed);//设置Speed转速
}
else//Speed值为负
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12);//电机反转
GPIO_SetBits(GPIOB, GPIO_Pin_13);
PWM12_SetCompare1(-Speed);//设为-Speed转速
}
}
//设置左路电机PWM 速度
void MotorL_SetSpeed(int8_t Speed)
{
if (Speed >= 0)
{
GPIO_SetBits(GPIOB, GPIO_Pin_14);
GPIO_ResetBits(GPIOB, GPIO_Pin_15);
PWM12_SetCompare2(Speed);
}
else
{
GPIO_ResetBits(GPIOB, GPIO_Pin_14);
GPIO_SetBits(GPIOB, GPIO_Pin_15);
PWM12_SetCompare2(-Speed);
}
}
3.3小车运动封装
/******************************模块简介*******************************
模块功能:小车运动 模块函数封装
*********************************************************************/
#include "stm32f10x.h" // Device header
#include "Motor.h"
#include "Delay.h"
void Car_Stop()//小车停止
{
MotorR_SetSpeed(0);
MotorL_SetSpeed(0);
}
void Car_Up()//小车前进
{
MotorR_SetSpeed(80);
MotorL_SetSpeed(80);
}
void Car_Down()//小车后退
{
MotorR_SetSpeed(-80);
MotorL_SetSpeed(-80);
}
void Car_TurnRight()//小车右转
{
MotorR_SetSpeed(-50);
MotorL_SetSpeed(100);
}
void Car_TurnLeft()//小车左转
{
MotorR_SetSpeed(100);
MotorL_SetSpeed(-50);
}
void Car_Spin()//小车旋转
{
MotorR_SetSpeed(-100);
MotorL_SetSpeed(100);
}
在主函数中分别调用上述封装函数,即可实现电机的调速运动。
上述内容仅为作者个人看法,受限于水平和经验原因,部分描述可能存在问题。希望读者可以指出错误的地方,一起交流学习。毕竟读他人的东西只有做到双眼自将秋水洗,才能一生不受古人欺。
更新日期 :2023/6/8文章来源:https://www.toymoban.com/news/detail-556163.html
作 者:公子易平文章来源地址https://www.toymoban.com/news/detail-556163.html
到了这里,关于STM32单片机PWM控制实现电机调速度(小车运动,STM32F103C8T6&TB6612&TT电机)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!