提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- DH约定
- 正运动学
- 总结
前言
本文介绍串联机械臂基础算法,并使用python和matlab进行算法设计、建模仿真。
一、DH约定
标准DH配置

坐标系示意图

DH参数
 文章来源:https://www.toymoban.com/news/detail-557900.html
文章来源:https://www.toymoban.com/news/detail-557900.html
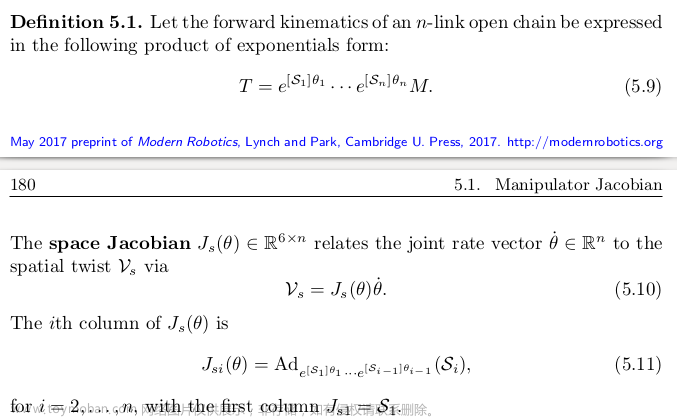
二、正运动学
1.求解末端执行器矩阵
代码如下(python):文章来源地址https://www.toymoban.com/news/detail-557900.html
import numpy as np
import math
"""
FR5的DH参数配置
Link i θi di ai αi
1 到了这里,关于机器人学-正运动学的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!