无人机由于其方便快捷,精度高等特点已经广泛应用于农田尺度的作物生长监测。尤其是近年来大疆推出了两个多光谱无人机,价格也相较便宜。但目前无人机的使用实际上需要进一步处理才能获取得到农田的基本信息,主要包括影像的校正和图像拼接,这些过程都可以基于软件代码实现,本文针对自己用的方法对无人机处理的整个流程进行介绍
无人机影像与卫星遥感有很大区别,其每次任务一般会有很多重叠的图片,图片会存在暗角效应、畸变、黑电平等问题需要一步步的进行处理
1.辐射校正
1.1 黑电平校正
黑电平也叫暗电流,指的是相机在完全遮光的情况下由于内部电流引起的传感器噪声,一般都是基于完全遮光的照片得到暗电流的DN值(Digital Number 是指通过感光得到照片矩阵的数值)矩阵,对于比较均一的暗电流可以直接用照片DN值减去固定的暗电流DN值
1.2 暗角校正
暗角指的是镜头边缘与光源形成夹角造成边缘失光的现象

中心点实际上是真实值,离中心点越远,失光现象越严重。目前比较常用的办法就是基于像素点与中心点的距离进行多项式拟合,拟合参数一般在相机的exif信息中都有保存
1.3 增益曝光时间校正
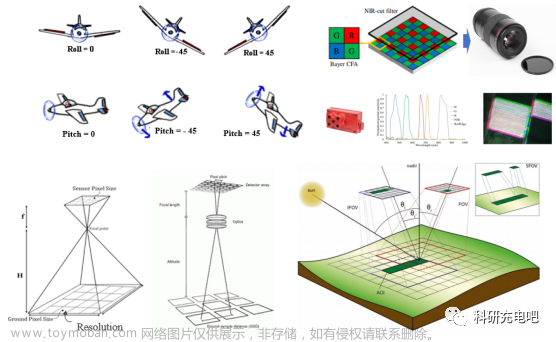
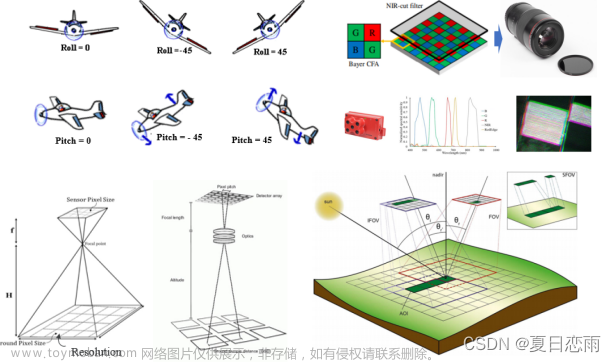
增益是指DN值对光强的响应度(即光强变化一个单位DN值变化多少),曝光时间是传感器对光强的响应时间。一般增益和曝光时间都与最终照片的亮度成正比,因此对于较高亮度的物体要防止过曝现象(DN值超过照片最大值),对于DJI的多光谱相机在AE解锁的情况下,曝光时间会随光强的变化而变化,因此在进行总体比较时需要对DN值进行校正使不同照片具有可比性
1.4 辐射定标
我们获取的照片上显示的是DN值数据,同一物体在不同的光强下具有较大的差异,为了使不同光强,或者对于农田观测就是不同时期的影像具有可比性,一般地物的反射特征都用反射率表示。一般获取反射率的方法是使用校正板在飞机执行任务过程中得到不同反射率的校正板的DN值再利用简单的统计模型计算反射率。
对于大疆多光谱相机,其顶部具有辐射传感器,只要知道顶部辐射传感器对光强的响应和多光谱相机与光强响应的差异就能计算反射率(或者说是二向反射因子),不过从目前我的经验看,只使用传感器还是存在一些问题的,可以与地面参考板结合来使用,在执行飞行任务的高度使用参照板还能去除大气的干扰(虽然无人机飞行较低,大部分情况可以不考虑大气效应)
2.几何校正
2.1 畸变校正
由于相机小孔成像的特征,相机的成像与真实情况有一定的畸变

目前一些三维建模软件都可以根据相机图片计算畸变校正参数,一些相机的exif信息中也会包含畸变参数。利用坐标变换就能对像素进行重新分布修正畸变
2.2波段配准
对于目前的多数多光谱相机,一般是由多个单波段相机的组合,由于相机位置的差异,不同波段的影像也会存在偏移

这个对于大疆来说,每个影像相对于近红外波段的像素相对位置偏差可以在exif信息中找到,之后进行简单的平移即可
3.影像拼接
对于影像拼接目前已经有了很多商业软件如Metashape、pix4D、大疆智图等,影像拼接的基本步骤主要有
-
添加照片
-
对齐照片(估计相机位置与重叠位置)
-
建立点云
-
建立三维模型(可选)
-
建立DEM
-
建立正射影像
对于大疆的影像,Metashape能够直接识别,因此可以在添加原始照片后其可以自动进行黑电平、暗角、畸变等校正过程。因此只需要拼接完成后进行辐射校正,或者对原始照片利用顶部传感器进行反射率校正和增益曝光时间校正,提高不同照片的一致性
4.植被指数提取
在完成以上步骤之后就得到了农田的多光谱影像,然后利用划分小区或取样位置的shp图就可以对多光谱信息进行提取与反演,从而对农田作物生长信息进行获取与评估。基于评估信息可以开展一定的农田管理措施,实现农田的高产高效生产文章来源:https://www.toymoban.com/news/detail-558454.html
参考 链接文章来源地址https://www.toymoban.com/news/detail-558454.html
到了这里,关于无人机影像处理流程的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!