LET’S GO
哈喽鸭,大家好,在总览中,咱们提到了整个系统的主控MCU、模块和软件。系列文章分为环境搭建、机械臂板块、各类模块使用、软件板块四大类。
【注】系列文章适合小白从0到1,自主完成一个较完整的物联网产品。另外,我会较为详细的讲解各类板块的重难点,当然由于每个同学的电脑环境,或是硬件配置,中途会出现各类问题,我希望大家能先独立思考,这样才真正有助于提升自己的能力,当然,有问题的同学可以在下面评论,每一条我都会认真回复的。
下面正式进入系列文章的第一步,你需要准备好对应的硬件产品(下面会说),以及确保环境搭建的正确。
1.硬件准备
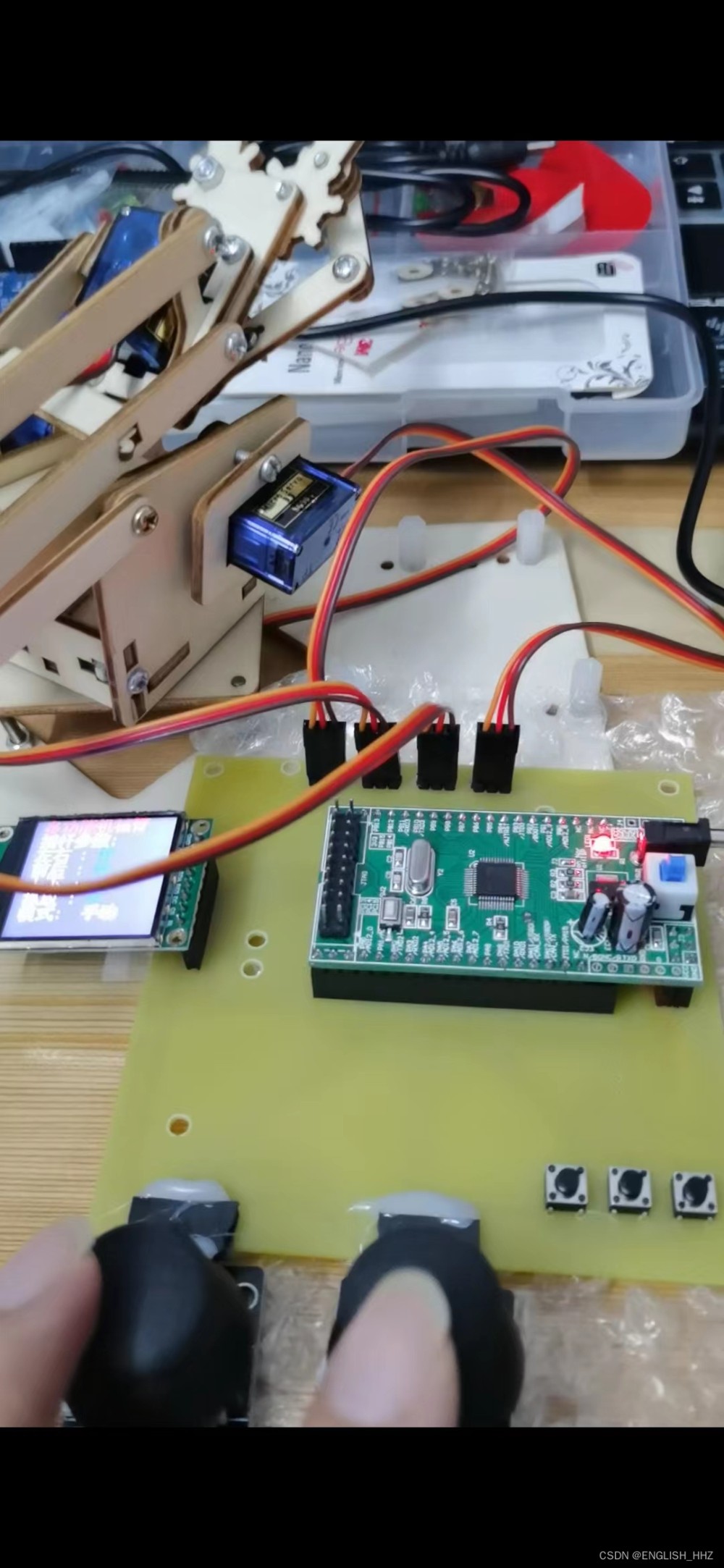
1)六自由度机械臂
可以买现成的,咱们只需要支架和舵机就OK,不需要商家提供的开发板(有能力的同学也可以自建建模然后3D一个支架),选便宜的!支架+舵机就够了!看谁便宜选谁!(PS:我当时买的是520,对冲着这浪漫的数字买的。再强调亿遍,只要支架+舵机!支架+舵机!支架+舵机!) 【注意】买回来后,是一堆零件,大家先别急着安装,原因就是咱们先要将各个舵机复位后,再进行安装。对于舵机复位的相关知识,我将在下篇文章进行讲解。(PS:这篇文章是提前准备工作哦,大家应该在我下篇文章出来的时候完成以下的工作:1.硬件设备都买了(至少机械臂和STM32的板子买了,因为下篇文章我讲机械臂) 2.KEIL5成功破译且能正常使用)
【注意】买回来后,是一堆零件,大家先别急着安装,原因就是咱们先要将各个舵机复位后,再进行安装。对于舵机复位的相关知识,我将在下篇文章进行讲解。(PS:这篇文章是提前准备工作哦,大家应该在我下篇文章出来的时候完成以下的工作:1.硬件设备都买了(至少机械臂和STM32的板子买了,因为下篇文章我讲机械臂) 2.KEIL5成功破译且能正常使用)
2)HS-SR04超声波模块
直接某宝上面搜就可以,几块钱,很便宜,顺便可以在店铺上把他们提供的资料看一下【重点看原理实现】(PS:不看也没关系,反正我后面会讲)
3)JDY-31蓝牙
也是某宝,几块,很便宜。
4)4针I2C的OLED
这个稍微贵点,大概20几吧,注意要选四针I2C的OLED,不要SPI总线的,原因就是I2C的OLED屏幕实现起来更简单。
5)STM32开发板
买的时候记得看芯片,想省钱的话可以买f103系列,中规中矩的可以选择f407系列,我用的是F407ZET6,大概200多吧(PS:具体厂商的板子价格不一样,正点原子的就贵些,大家买的时候选那种外接引脚多的!还有就是5v电源引脚多的!)
6)杜邦线
这个是必需品,多备着点,公对公、母对母和公母的三种都备点儿,不然到时候用起来没有就很烦了。
2.环境搭建
1)KEIL5
这个教程非常多,我就偷个懒不写了,大家直接在CSDN上搜一下,记得破译哦,不然代码量起来了就不能用了(PS:还是不偷懒吧,我会将相关的环境搭建放在我的资源里,大家也可以自行下载)
这里我还要多罗嗦几句,大家在成功破译keil5后,先写两行代码试一下是否能用,没有报错的话,就是可以的。另外,这里建议将你现在的工程当作一个DEMO,当作一个模板(备份)。这样一来就有两个好处,一方面你可以copy这个模板继续开发,并且就算出现大问题,你初始的模板也还在
LIKE THIS Warning不用管,没有ERROR就行。咱们敲代码的记住一句话:代码和人,有一个能跑就行
Warning不用管,没有ERROR就行。咱们敲代码的记住一句话:代码和人,有一个能跑就行
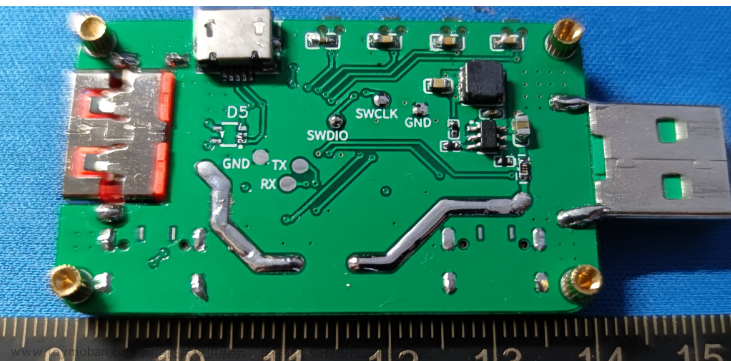
2)J-Link驱动
这个看你的板子是买的啥样的,有的用J-Link下载,有的用ST-Link下载,但都需要安装对应的驱动,不然咱们在Keil里面写的代码就下载不到咱们的板子里了。 我的资源里有两个J-Link驱动,随便一个安装就是,一路NEXT就OK。有些同学用ST-Link,把下载线一插上,电脑会弹出提示,按照提示安装就OK。文章来源:https://www.toymoban.com/news/detail-562689.html
我的资源里有两个J-Link驱动,随便一个安装就是,一路NEXT就OK。有些同学用ST-Link,把下载线一插上,电脑会弹出提示,按照提示安装就OK。文章来源:https://www.toymoban.com/news/detail-562689.html
3)MIT APP Inventor2
这个不用下载,直接百度就可以,是个在线平台,大家可以先去小破站上看看相关的使用教程。 界面大概就是酱紫,用QQ登录就OK。因为咱们需要用蓝牙作为通讯方式,所以在B站可以搜相关的蓝牙APP制作教程。文章来源地址https://www.toymoban.com/news/detail-562689.html
界面大概就是酱紫,用QQ登录就OK。因为咱们需要用蓝牙作为通讯方式,所以在B站可以搜相关的蓝牙APP制作教程。文章来源地址https://www.toymoban.com/news/detail-562689.html
到了这里,关于基于STM32的机械臂抓取系统【1】【环境搭建】的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!