完整资源请查看主页置顶博客(专享优惠)
使用MATLAB2021b打开
主要内容:
功率计算模块、虚拟同步发电机控制模块、电压合成模块、电压电流双环控制模块!
1.两台VSG并联,开始各自带负载10KW,在0.3秒的时候加入公共负载10KW,稳定后两台VSG可以均分公共负载的功率
2.输出的三相电压电流波形THD<2%
可在此模型的基础上加入自适应控制(自适应惯量阻尼控制、自适应虚拟阻抗控制),前级光伏储能等部分。
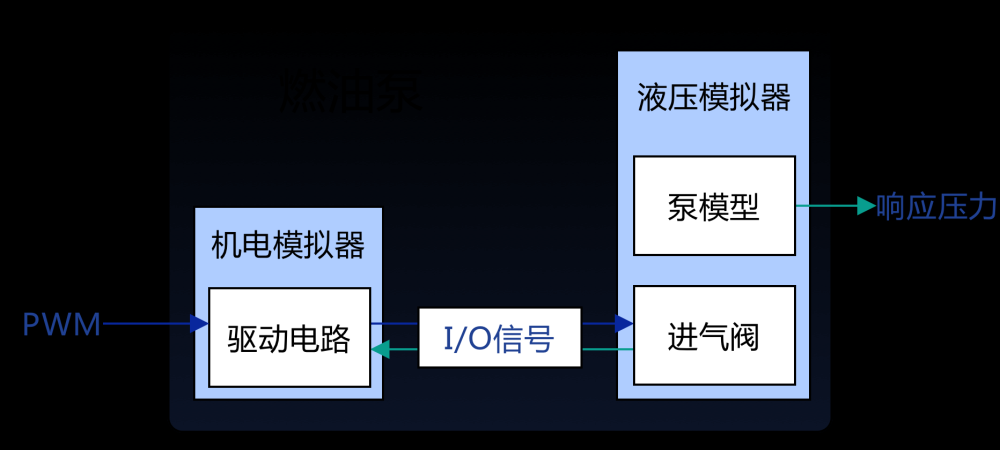
主体电路控制模型

VSG1逆变器输出功率波形

VSG2逆变器输出功率波形

可见,两台逆变器的有功输出相同,即可实现两台逆变器的有功功率均分。(对于无功功率,则需要进一步增加虚拟阻抗控制)
逆变器输出电压电流波形

电压电流波形完美,几乎没有谐波!!!!
整个模型控制结构完整,波形完美,可作为基础模型进一步创新改进!!!
%%%%%%%%%%
#include<stdio.h>
#include<windows.h>
int main()
{
double x, y, a;
for (y = 1.5; y > -1.5; y -= 0.1)
{
for (x = -1.5; x < 1.5; x += 0.05)
{
a = x * x + y * y - 1;
if (a * a * a - x * x * y * y * y <= 0)
{
printf("+");
Sleep(1);
}文章来源地址https://www.toymoban.com/news/detail-563688.html
else
printf(" ");
}
printf("\n");
}
printf("爱情来的太快就像龙卷风,你把握不住的,让哥来\n----HWH");
return 0;文章来源:https://www.toymoban.com/news/detail-563688.html
}
到了这里,关于基于虚拟同步发电机控制的双机并联MATLAB仿真模型的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!