一、说明
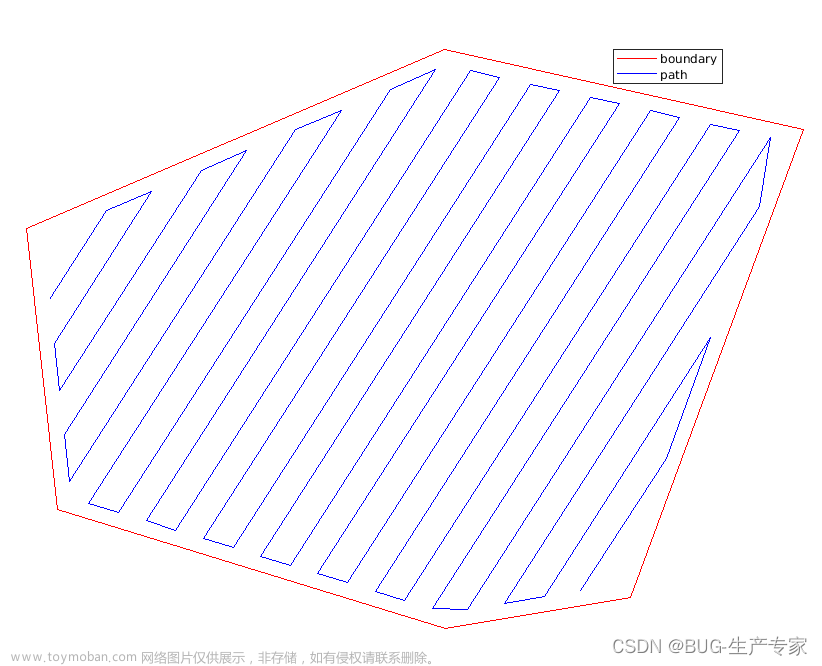
在本教程中,我将向您展示如何设置移动机器人的测程。本教程是“机器人模拟”指南中的第二个教程。测量位移是仿真中的重要内容,设置测程的官方教程在此页面上,但我将逐步引导您完成整个过程。
您可以在此处获取此项目的完整代码。让我们开始吧!
 文章来源:https://www.toymoban.com/news/detail-563695.html
文章来源:https://www.toymoban.com/news/detail-563695.html
二、ROS 2 中的里程计
在机器人技术中,测程法是关于使用来自传感器的数据来估计机器人的位置、方向和速度随时间相对于某个文章来源地址https://www.toymoban.com/news/detail-563695.html
到了这里,关于【机器人模拟-02】 模拟移动机器人设置里程计的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!