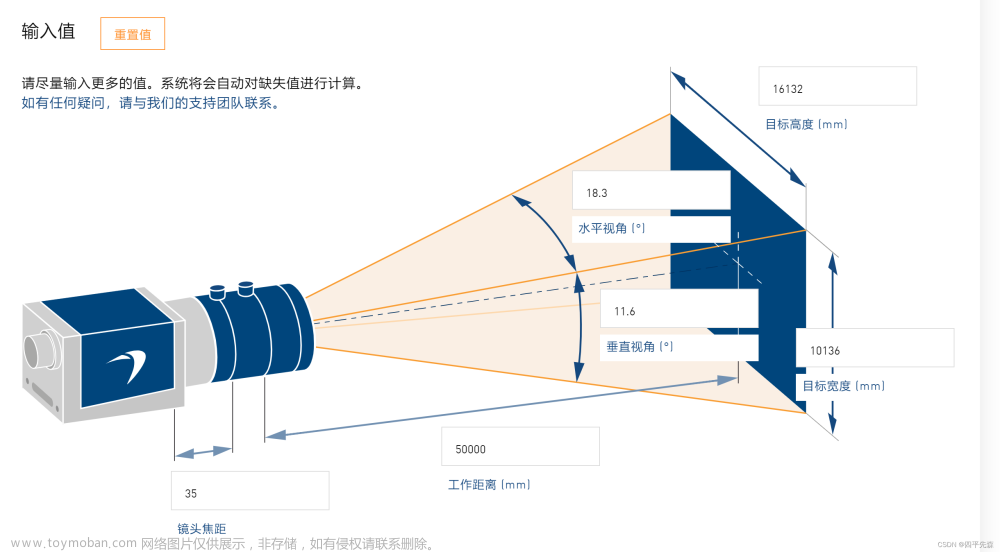
视场: FOV 相机可见的视野范围
景深: DOF 可以清晰拍摄被测物的距离范围。
工作距离: WD 相机镜头至被测物的距离。
物像距离: 被测物至芯片靶面的距离。
像元尺寸: 一个像素在长和宽方向上所代表的实际大小,单位通常为微米。像元尺寸越大,分辨率越低。
像元深度: 8bit 灰阶 2**8=256、10bit 灰阶 2**10=1024、12bit 灰阶 2**12=4096、
光学放大倍数: PMAG = 感光芯片尺寸(mm) / 视场(mm)
工业相机常用像素
常用的像素:
752*486 38万像素
640*480 33万像素
800*600 48万像素
1024*768 80万像素
1280*1024 130万像素
1600*1200 200万像素
工业相机的大分辨率的高速传输,需要搭配图像采集卡,注意相机的传输的接口支持多少传输量。
工业相机芯片尺寸:
必要概念: 相机芯片是一种感光器件,芯片尺寸即为成像靶面大小。
选型原则: 由于镜头像圈为圆形,相机靶面为长方形,因此镜头与相机搭配时,必须使镜头的像圈直径≥相机靶面的对角线长度。
否则会出现渐晕现象:镜头像圈直径小于芯片尺寸出现的问题。
单位换算 1英寸 = 16毫米
注意:正常情况1英寸 = 25.4毫米 但这里不一样。
例如:
1/1英寸,长12.8 宽9.6 斜边16、毫米
2/3英寸,长8.8 宽6.6 斜边11、毫米
1/2英寸,长6.4 宽4.8 斜边8、毫米
1/3英寸,长4.3 宽3.6 斜边6、毫米
1/4英寸,长3.6 宽2.7 斜边4、毫米
芯片尺寸计算示例:1英寸
芯片尺寸计算案例:2/3英寸
芯片尺寸计算案例:1/2英寸
快门时间
光圈: 像阀门开大开小一样,来控制进光量的大小。
快门: 快门是用来控制进光时间的阀门,是一个元件。
曝光量: 通过光圈限制进光量的大小,通过快门控制进光的时间,这两者进行调节就可以控制曝光量的大小。曝光量大,图片亮度大,过曝。曝光量小,图片亮度小,欠曝。
卷帘快门: 每次曝光1行
优缺点: 卷帘快门有更低的噪声,更高的帧频率,但需要较长的曝光时间,否则易出现晃动,斜坡图形和部分曝光。
全局快门: 每次曝光1面
优缺点: 全局快门适合高速或极速摄影,但读出噪声比卷帘快门高,曝光时间很短但帧频较低。
最低照度
感光芯片最低可接受的光信号
相机在最低多少光照度的情况下,可见影像。
普通型:1~3 Lux
日光型:0.1 Lux
星光型:0.01 Lux
红外型:采用红外照明,无光也可成像文章来源:https://www.toymoban.com/news/detail-564432.html
相机增益
通过调节电压放大环节,调节图像亮度。文章来源地址https://www.toymoban.com/news/detail-564432.html
到了这里,关于工业相机的基础参数释义的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!