💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现
💥1 概述
文献来源:

摘要:电压无功控制是保证配电网经济安全运行的重要任务,协调多种调节手段能提高配电网的运行效率。考虑了有载调压变压器、电压调节器、分组投切电容器和分布式电源逆变器等电压无功调控设备,并针对现有电压无功控制模型存在的无谓动作和求解效率低等问题,提出了一种考虑设备动作损耗的配电网分布式电压无功优化策略。首先,基于支路潮流方程建立了配电网电压无功控制模型,并松弛为混合整数二阶锥规划。同时考虑到设备的动作损耗,提出了基于模型预测控制的滚动优化模式。进一步基于交替方向乘子法实现配电网多区域分布式协同优化。最后,基于改进的IEEE33节点测试系统进行了仿真。仿真结果表明:所提控制策略能够避免设备的无谓动作,并解决了"维数灾"问题,提高了配电网的电压无功控制效率。
关键词:
主动配电网;电压无功控制;二阶锥规划;模型预测控制;一致性约束;交替方向乘子法;
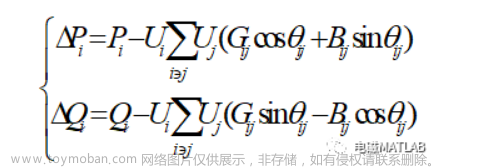
主动配电网中包含有多种灵活调控设备,例如 OLTC、VR、CB 和 DG。其中 VR 是一种电力电子
调压设备,其类似 OLTC,具有多个可调档位,能够改变支路两侧的电压;但不同于 OLTC 的是 VR用于电压等级相同的支路,能够多次调节;同时 VR两侧的电压均为未知量,使得数学模型的复杂度大大提高,具体将在后文阐述。由于配电网通常为辐射网络,因此本文在标幺值系统下采用支路潮流方程描述配电网络,如图 1 所示。

第 1.1 节建立了单个时间断面的潮流模型,但其无法描述设备的变位情况,没有考虑设备的动作
成本,容易造成设备的无谓动作,这将影响设备的使用寿命。本节基于模型预测控制的思想,将上述潮流模型嵌入在滚动优化模式中,由此考虑设备的操作成本。滚动优化的基本思想如图 2 所示。

由上述可知,造成模型难以求解的原因是 VR模型的非线性,因此本文将包含有 VR 的支路视为两
个网络的联络部分,并将其拆分为两个子网络[28],如图 4 所示。需要注意的是,本文所提配电网络为同一电压等级的配电网,归属于相同的调度部门管辖。

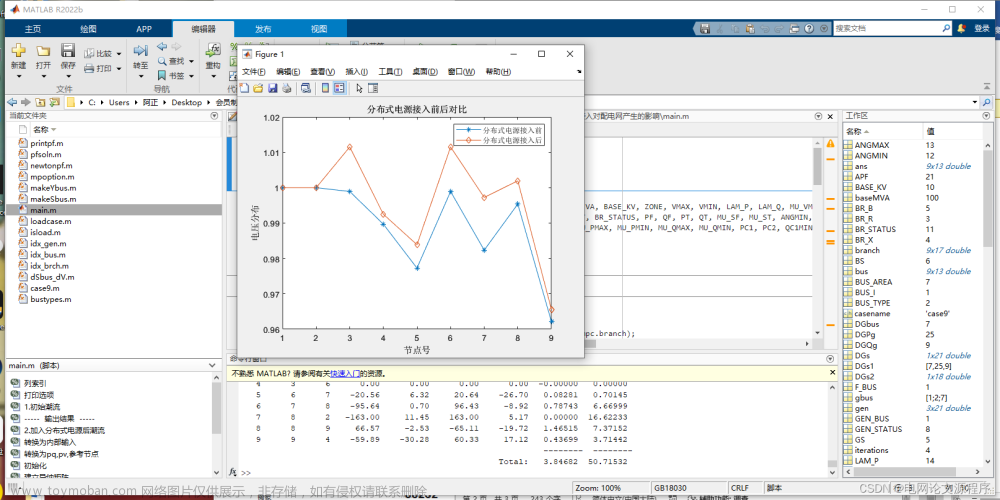
📚2 运行结果


部分代码:
%定义变量
U=sdpvar(33,24);%电压的平方
I=sdpvar(32,24);%电流的平方
P=sdpvar(32,24);%线路有功
Q=sdpvar(32,24);%线路无功
Pg=sdpvar(33,24);%发电机有功
Qg=sdpvar(33,24);%发电机无功
Pin=-father*P+father*(I.*(r*ones(1,24)))+son*P;%节点注入有功
Qin=-father*Q+father*(I.*(x*ones(1,24)))+son*Q;%节点注入无功
Ploss_total=sum(sum(I.*(r*ones(1,24))));%目标函数,网损最小
%约束条件
C1=[U>=Umin,U<=Umax,Pg>=-Pgmax,Pg<=Pgmax,Qg>=-Qgmax,Qg<=Qgmax];%电压边界
C1=[C1,I>=0,I<=0.11,P>=-0.11,P<=0.11,Q>=-0.11,Q<=0.11];%电流和功率边界
C2=[Pin+Pload-Pg==0];%有功KCL约束
C3=[Qin+Qload-Qg==0];%无功KCL约束
C4=[U(Line(:,2),:)==U(Line(:,1),:)-2*(r*ones(1,24)).*P-2*(x*ones(1,24)).*Q+((r.^2+x.^2)*ones(1,24)).*I];%电压降落约束
C5=[U(Line(:,1),:).*I>=P.^2+Q.^2];%二阶锥约束
C=[C1,C2,C3,C4,C5];
toc%建模时间
ops=sdpsettings('solver','cplex');
result=solvesdp(C,Ploss_total,ops);
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。文章来源:https://www.toymoban.com/news/detail-564561.html
[1]张蕊,李铁成,李晓明等.考虑设备动作损耗的配电网分布式电压无功优化[J].电力系统保护与控制,2021,49(24):31-40.DOI:10.19783/j.cnki.pspc.210276.文章来源地址https://www.toymoban.com/news/detail-564561.html
🌈4 Matlab代码实现
到了这里,关于考虑设备动作损耗的配电网分布式电压无功优化(Matlab代码实现)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!