STM32:利用PWM波控制电调过程和注意事项
在进行模型控制的过程中,如四旋翼无人机等,需要用到电机,这些电机需要通过电调来控制电机的转速。在电调模块中带有的说明书一般都是利用遥控器进行控制,有些情况需要自己通过信号控制电调,而非遥控器,这个时候需要用到单片机生成PWM波。
总体思路
电调的型号和种类繁多,但是大部分的原理应该相同,这里面采用FLYCOLOR家的多旋翼无刷电子调速器进行实验,单片机选择的是正点原子的stm32 MINI 开发版,芯片信号为stm32f103rct6。
为了快速控制电调,首先需要一个生成PWM波形的程序,这里面采用的是正点原子中的例程。
例程中的程序是利用TIMER1 定时器生成PWM波来控制指示灯DS0的亮暗过程,首先下载程序可以看出指示灯在逐渐亮灭。因为采用的PA8作为IO口的输出,电调的控制信号可以接在此端口上。这样就有了一个可以生成PWM波形的程序。
1. 电调说明注意事项
看电调的说明书,说明书中会有参数和连接方式等介绍,这些需要注意一下,重点看的是工作过程提示音,



这个图是在进行油门校准和正常工作的过程通过提示音判断每个过程是否成功,在实际使用的时候具有很好的提示作用。
注意以下问题:
- 在电调上电的过程中会有整成工作过的提示音。
- 在进行油门校准的过程中,如果输出上电的油门处于大油门,那么将会进行大油门的量程设定,然后在听到提示音过后,需要进行小油门的设定,最终听到油门校准成功的设定之后,就可以正常使用了。
- 如果上电开始时处于最小油门,则不需要设定,直接就能工作。
2. STM32生成PWM波注意事项
在了解了油门校准的过程后,那么如果对应成PWM波形的控制,注意以下几点:
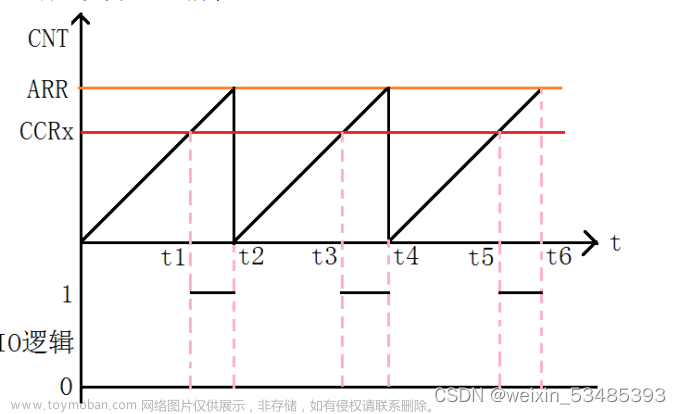
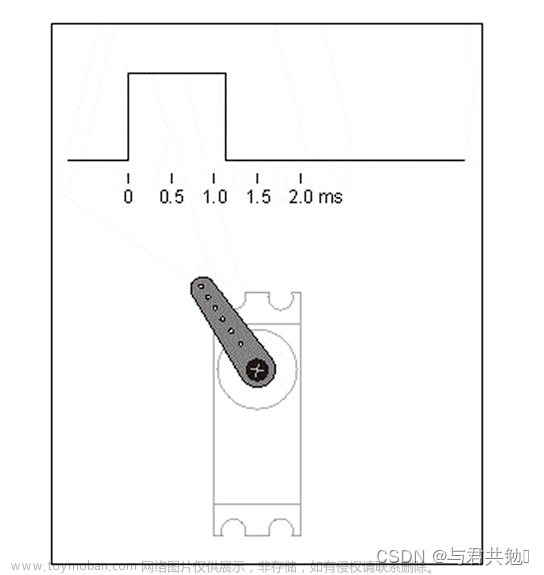
- 在控制电调的过程中,PWM的频率50Hz,即20ms,占空比越高,转速越快,占空比的范围为0.8ms-2.2ms。
- 在进行校准的过程中,需要对占空比的波形进行延时,先校准大油门,再校准小油门,保证听到校准成功的提示音听到再进行下一步,在两个油门校准的过程中留好时间。
3. 程序代码
接下来是程序代码:
pwm.c文件
#include "pwm.h"
#include "led.h"
//
// PWM 输出初始化
// arr 自动重装值 psc 时钟预分频数
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //
//引脚复用,PA8输出TIM1_CH1波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //
TIM_TimeBaseStructure.TIM_Prescaler =psc; //
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 这个模式需要选择PWM1 模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //
TIM_OCInitStructure.TIM_Pulse = 0; //
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //
TIM_CtrlPWMOutputs(TIM1,ENABLE);
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //
TIM_ARRPreloadConfig(TIM1, ENABLE); //
TIM_Cmd(TIM1, ENABLE); //
}
main.c
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "pwm.h"
//ALIENTEK Mini STM32¿ª·¢°å·¶Àý´úÂë8
//PWMÊä³öʵÑé
//¼¼ÊõÖ§³Ö£ºwww.openedv.com
//¹ãÖÝÊÐÐÇÒíµç×ӿƼ¼ÓÐÏÞ¹«Ë¾
int main(void)
{
u16 led0pwmval=2900;
u8 dir=1;
delay_init(); //
//LED_Init(); //
TIM1_PWM_Init(57599,25);//=72000/(57599+1)/25=50hz 50Hz
TIM_SetCompare1(TIM1,5760);
TIM_SetCompare1(TIM1,5760);
delay_ms(1500); //
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
TIM_SetCompare1(TIM1,2880); //
TIM_SetCompare1(TIM1,2880);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
delay_ms(1500);
// TIM_SetCompare1(TIM1,2900);
while(1)
{
// delay_ms(1000);
if(dir)led0pwmval++;
else led0pwmval--;
if(led0pwmval>5760)
{
dir=0;
led0pwmval = 2900;
}
if(led0pwmval==2900)dir=1;
TIM_SetCompare1(TIM1,led0pwmval);
}
}
注意代码中的输出PWM1模式,然后占空比的大小为led0pwmval/57600,设定中间添加延时,先可以时间长一点,然后根据校准需要的时间进行调整。
4. 波形验证
按照上述惭怍,这样就可以产生所需要的PWM波形。

校准大占空比,即大油门波形。
设定小占空比,即小油门波形。文章来源:https://www.toymoban.com/news/detail-566325.html
最后连接上电调,既可以工作,可以看到校准完油门之后,根据程序转速在逐渐变化。文章来源地址https://www.toymoban.com/news/detail-566325.html
到了这里,关于STM32:利用PWM波控制飞盈电调过程和注意事项的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!