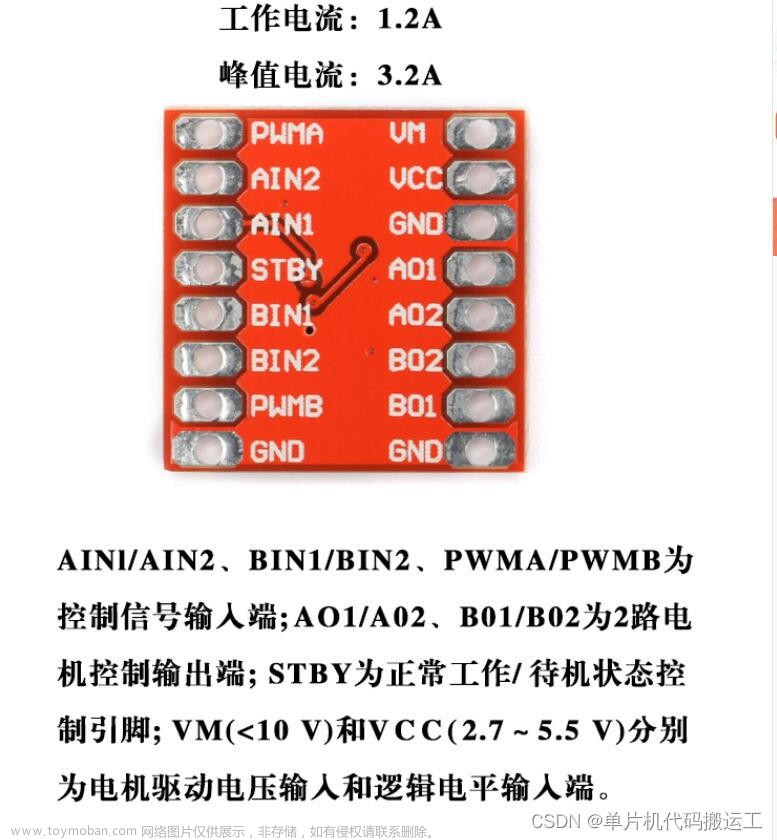
直流有刷驱动板电流电压采集
电流采集会涉及到电流环的使用。



 文章来源地址https://www.toymoban.com/news/detail-573001.html
文章来源地址https://www.toymoban.com/news/detail-573001.html
#include "./adc/bsp_adc.h"
#include ".\motor_control\bsp_motor_control.h"
#include "./led/bsp_led.h"
#include "./usart/bsp_debug_usart.h"
__IO uint16_t ADC_ConvertedValue;
DMA_HandleTypeDef DMA_Init_Handle;
ADC_HandleTypeDef ADC_Handle;
static uint16_t adc_buff[ADC_NUM_MAX]; // 电压采集缓冲区
static uint16_t vbus_adc_mean = 0; // 电源电压 ACD 采样结果平均值
static uint32_t adc_mean_sum = 0; // 平均值累加
static uint32_t adc_mean_count = 0; // 累加计数
/**
* @brief ADC 通道引脚初始化
* @param 无
* @retval 无
*/
static void ADC_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能 GPIO 时钟
CURR_ADC_GPIO_CLK_ENABLE();
VBUS_GPIO_CLK_ENABLE();
// 配置 IO
GPIO_InitStructure.Pin = CURR_ADC_GPIO_PIN;
GPIO_InitStructure.Mode = GPIO_MODE_ANALOG;
GPIO_InitStructure.Pull = GPIO_NOPULL ; //不上拉不下拉
HAL_GPIO_Init(CURR_ADC_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.Pin = VBUS_GPIO_PIN;
HAL_GPIO_Init(VBUS_GPIO_PORT, &GPIO_InitStructure);
}
void adc_dma_init(void)
{
// ------------------DMA Init 结构体参数 初始化--------------------------
// ADC1使用DMA2,数据流0,通道0,这个是手册固定死的
// 开启DMA时钟
CURR_ADC_DMA_CLK_ENABLE();
// 数据传输通道
DMA_Init_Handle.Instance = CURR_ADC_DMA_STREAM;
// 数据传输方向为外设到存储器
DMA_Init_Handle.Init.Direction = DMA_PERIPH_TO_MEMORY;
// 外设寄存器只有一个,地址不用递增
DMA_Init_Handle.Init.PeriphInc = DMA_PINC_DISABLE;
// 存储器地址固定
DMA_Init_Handle.Init.MemInc = DMA_MINC_ENABLE;
// 外设数据大小为半字,即两个字节
DMA_Init_Handle.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
// 存储器数据大小也为半字,跟外设数据大小相同
DMA_Init_Handle.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
// 循环传输模式
DMA_Init_Handle.Init.Mode = DMA_CIRCULAR;
// DMA 传输通道优先级为高,当使用一个DMA通道时,优先级设置不影响
DMA_Init_Handle.Init.Priority = DMA_PRIORITY_HIGH;
// 禁止DMA FIFO ,使用直连模式
DMA_Init_Handle.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
// FIFO 大小,FIFO模式禁止时,这个不用配置
DMA_Init_Handle.Init.FIFOThreshold = DMA_FIFO_THRESHOLD_HALFFULL;
DMA_Init_Handle.Init.MemBurst = DMA_MBURST_SINGLE;
DMA_Init_Handle.Init.PeriphBurst = DMA_PBURST_SINGLE;
// 选择 DMA 通道,通道存在于流中
DMA_Init_Handle.Init.Channel = CURR_ADC_DMA_CHANNEL;
//初始化DMA流,流相当于一个大的管道,管道里面有很多通道
HAL_DMA_Init(&DMA_Init_Handle);
__HAL_LINKDMA(&ADC_Handle,DMA_Handle,DMA_Init_Handle);
}
/**
* @brief ADC 和 DMA 初始化
* @param 无
* @retval 无
*/
static void ADC_Mode_Config(void)
{
// 开启ADC时钟
CURR_ADC_CLK_ENABLE();
// -------------------ADC Init 结构体 参数 初始化------------------------
// ADC1
ADC_Handle.Instance = CURR_ADC;
// 时钟为fpclk 4分频
ADC_Handle.Init.ClockPrescaler = ADC_CLOCKPRESCALER_PCLK_DIV4;
// ADC 分辨率
ADC_Handle.Init.Resolution = ADC_RESOLUTION_12B;
// 禁止扫描模式,多通道采集才需要
ADC_Handle.Init.ScanConvMode = ENABLE;
// 连续转换
ADC_Handle.Init.ContinuousConvMode = ENABLE;
// 非连续转换
ADC_Handle.Init.DiscontinuousConvMode = DISABLE;
// 非连续转换个数
ADC_Handle.Init.NbrOfDiscConversion = 0;
//禁止外部边沿触发
ADC_Handle.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
//使用软件触发
ADC_Handle.Init.ExternalTrigConv = ADC_SOFTWARE_START;
//数据右对齐
ADC_Handle.Init.DataAlign = ADC_DATAALIGN_RIGHT;
//转换通道 2个
ADC_Handle.Init.NbrOfConversion = 2;
//使能连续转换请求
ADC_Handle.Init.DMAContinuousRequests = ENABLE;
//转换完成标志
ADC_Handle.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
// 初始化ADC
HAL_ADC_Init(&ADC_Handle);
//---------------------------------------------------------------------------
ADC_ChannelConfTypeDef ADC_Config;
ADC_Config.Channel = CURR_ADC_CHANNEL;
ADC_Config.Rank = 1;
// 采样时间间隔
ADC_Config.SamplingTime = ADC_SAMPLETIME_3CYCLES;
ADC_Config.Offset = 0;
// 配置 ADC 通道转换顺序为1,第一个转换,采样时间为3个时钟周期
HAL_ADC_ConfigChannel(&ADC_Handle, &ADC_Config);
/** Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
*/
ADC_Config.Channel = VBUS_ADC_CHANNEL;
ADC_Config.Rank = 2;
// 采样时间间隔
ADC_Config.SamplingTime = ADC_SAMPLETIME_3CYCLES;
ADC_Config.Offset = 0;
if (HAL_ADC_ConfigChannel(&ADC_Handle, &ADC_Config) != HAL_OK)
{
while(1);
}
// 外设中断优先级配置和使能中断配置
HAL_NVIC_SetPriority(ADC_DMA_IRQ, 1, 1);
HAL_NVIC_EnableIRQ(ADC_DMA_IRQ);
HAL_ADC_Start_DMA(&ADC_Handle, (uint32_t*)&adc_buff, ADC_NUM_MAX);
}
/**
* @brief 电流采集初始化
* @param 无
* @retval 无
*/
void ADC_Init(void)
{
ADC_GPIO_Config();
adc_dma_init();
ADC_Mode_Config();
}
/**
* @brief 常规转换在非阻塞模式下完成回调
* @param hadc: ADC 句柄.
* @retval 无
*/
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
uint32_t adc_mean = 0;
HAL_ADC_Stop_DMA(hadc); // 停止 ADC 采样,处理完一次数据在继续采样
/* 计算电流通道采样的平均值 */
for(uint32_t count = 0; count < ADC_NUM_MAX; count+=2)
{
adc_mean += (uint32_t)adc_buff[count];
}
adc_mean_sum += adc_mean / (ADC_NUM_MAX / 2); // 累加电压
adc_mean_count++;
#if 1
adc_mean = 0;
/* 计算电压通道采样的平均值 */
for(uint32_t count = 1; count < ADC_NUM_MAX; count+=2)
{
adc_mean += (uint32_t)adc_buff[count];
}
vbus_adc_mean = adc_mean / (ADC_NUM_MAX / 2); // 保存平均值
#else
vbus_adc_mean = adc_buff[1];
#endif
HAL_ADC_Start_DMA(&ADC_Handle, (uint32_t*)&adc_buff, ADC_NUM_MAX); // 开始 ADC 采样
}
/**
* @brief 获取电流值
* @param 无
* @retval 转换得到的电流值
*/
int32_t get_curr_val(void)
{
static uint8_t flag = 0;
static uint32_t adc_offset = 0; // 偏置电压
int16_t curr_adc_mean = 0; // 电流 ACD 采样结果平均值
curr_adc_mean = adc_mean_sum / adc_mean_count; // 保存平均值
adc_mean_count = 0;
adc_mean_sum = 0;
if (flag < 17)
{
adc_offset = curr_adc_mean; // 多次记录偏置电压,待系统稳定偏置电压才为有效值
flag += 1;
}
if(curr_adc_mean>=adc_offset)
{
curr_adc_mean -= adc_offset; // 减去偏置电压
}else
{
curr_adc_mean=0;
}
float vdc = GET_ADC_VDC_VAL(curr_adc_mean); // 获取电压值
return GET_ADC_CURR_VAL(vdc);
}
/**
* @brief 获取电源电压值
* @param 无
* @retval 转换得到的电流值
*/
float get_vbus_val(void)
{
float vdc = GET_ADC_VDC_VAL(vbus_adc_mean); // 获取电压值
return GET_VBUS_VAL(vdc);
}
/*********************************** END OF FILE *********************************************/
#ifndef __BSP_ADC_H
#define __BSP_ADC_H
#include "stm32f4xx.h"
// ADC 序号宏定义
#define CURR_ADC ADC1
#define CURR_ADC_CLK_ENABLE() __ADC1_CLK_ENABLE()
#define ADC_VBUS_IRQ ADC_IRQn
#define ADC_VBUS_IRQHandler ADC_IRQHandler
#define VREF 3.3f // 参考电压,理论上是3.3,可通过实际测量得3.258
#define ADC_NUM_MAX 2048 // ADC 转换结果缓冲区最大值
#define GET_ADC_VDC_VAL(val) ((float)val/(float)4096.0f*VREF) // 得到电压值
/*********************** 电流采集 ******************/
// ADC GPIO 宏定义
#define CURR_ADC_GPIO_PORT GPIOB
#define CURR_ADC_GPIO_PIN GPIO_PIN_1
#define CURR_ADC_GPIO_CLK_ENABLE() __GPIOB_CLK_ENABLE()
#define CURR_ADC_CHANNEL ADC_CHANNEL_9
// ADC DR寄存器宏定义,ADC转换后的数字值则存放在这里
#define CURR_ADC_DR_ADDR ((uint32_t)ADC1+0x4c)
// ADC DMA 通道宏定义,这里我们使用DMA传输
#define CURR_ADC_DMA_CLK_ENABLE() __DMA2_CLK_ENABLE()
#define CURR_ADC_DMA_CHANNEL DMA_CHANNEL_0
#define CURR_ADC_DMA_STREAM DMA2_Stream0
#define ADC_DMA_IRQ DMA2_Stream0_IRQn
#define ADC_DMA_IRQ_Handler DMA2_Stream0_IRQHandler
#define GET_ADC_CURR_VAL(val) (((float)val)/(float)8.0/(float)0.02*(float)1000.0) // 得到电流值,电压放大8倍,0.02是采样电阻,单位mA。
/*********************** 电源电压采集 ******************/
#define VBUS_GPIO_PORT GPIOB
#define VBUS_GPIO_PIN GPIO_PIN_0
#define VBUS_GPIO_CLK_ENABLE() __GPIOB_CLK_ENABLE()
#define VBUS_ADC_CHANNEL ADC_CHANNEL_8
#define GET_VBUS_VAL(val) (((float)val-(float)1.24) * (float)37.0) // 电压最大值(测量电压是电源电压的1/37)
extern DMA_HandleTypeDef DMA_Init_Handle;
extern ADC_HandleTypeDef ADC_Handle;
void ADC_Init(void);
int32_t get_curr_val(void);
float get_vbus_val(void);
#endif /* __BSP_ADC_H */
文章来源:https://www.toymoban.com/news/detail-573001.html
到了这里,关于直流有刷驱动板电流电压采集的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!