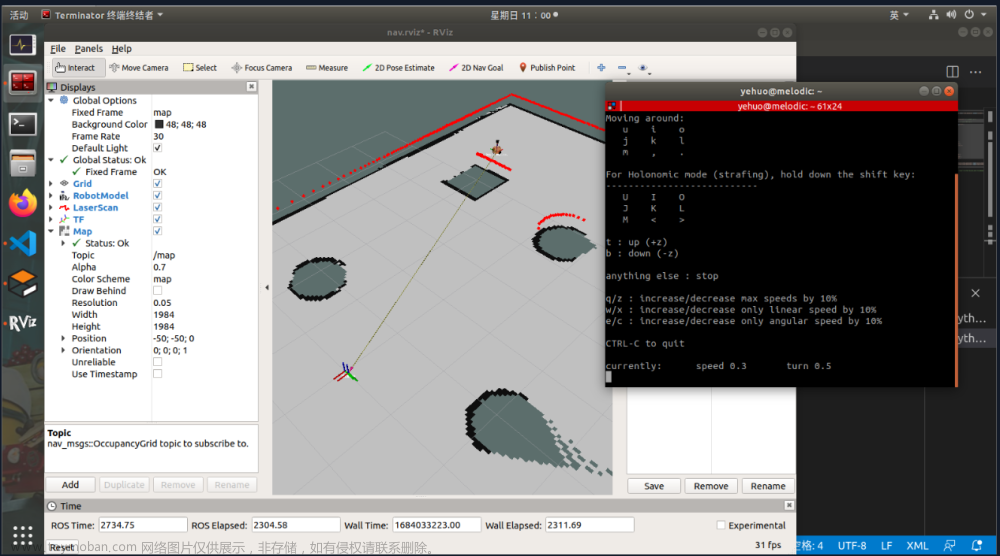
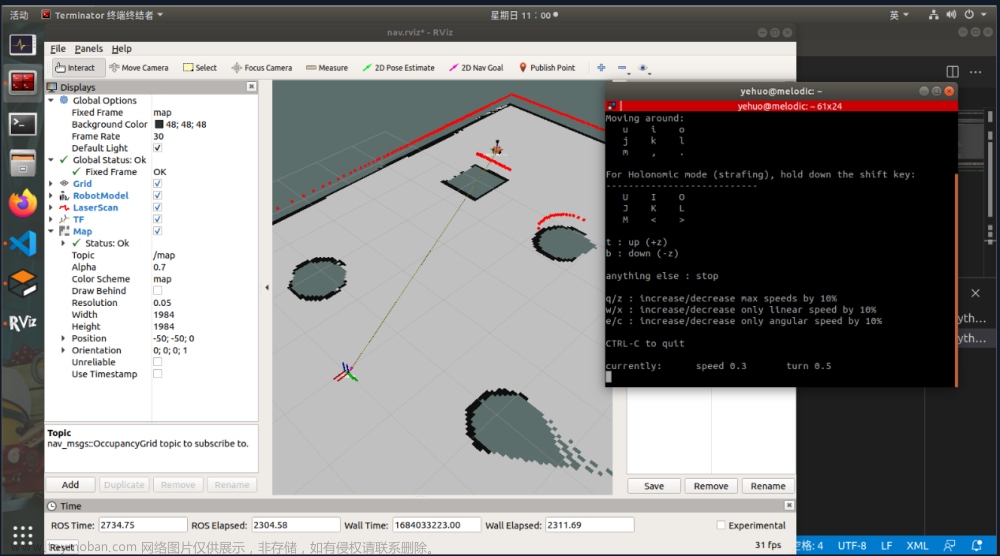
在准备大学生机器人比赛的时候,我们队三人都用自己的电脑打开gazebo运行智能车仿真,同样的虚拟机和Ubuntu、同样的工程文件、同样的车速和地图,在其他两人的电脑上跑完一圈只用40秒左右,而在我的电脑上却用了差不多两分钟,并且发现我电脑上gazebo的FPS比他们少了一半左右。在网上查了都几乎说是改world文件的<real_time_update_rate>、<max_step_size>和<real_time_factor>三者的数值或把<real_time_factor>和<real_time_update_rate>注释掉,不得不说这样做确实能提高gazebo仿真速度,但因为受比赛规则限制,我们不能修改world文件,所以上面的方法即使有效,我也不能采用。偶然间,我发现修改VMware虚拟机设置里的处理器数量也可以明显提高gazebo的仿真速度。具体如下: 文章来源:https://www.toymoban.com/news/detail-573508.html
文章来源:https://www.toymoban.com/news/detail-573508.html
 文章来源地址https://www.toymoban.com/news/detail-573508.html
文章来源地址https://www.toymoban.com/news/detail-573508.html
到了这里,关于gazebo仿真速度慢的问题的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!