一、连接相机
将相机插入USB3.0端口。
二、下载ZED SDK(Jetson)
1、NVIDIA Jetson安装操作系统Jetpack
2、下载和系统匹配的ZED SDK
进入下载的文件夹:
cd path/to/download/folder使用chmod +x命令增加安装程序的执行权限,注意将名称替换为自己下载的版本:
chmod +x ZED_SDK_JP4.3_v3.0.run运行:
./ZED_SDK_JP4.3_v3.0.run安装开始时,会显示软件许可证Software License,按Enter看完后按q。
在安装过程中,需要回答有关依赖项dependencies,工具tools和示例samples的安装的一些问题,按y和Enter。
因为在Jetson板上,CUDA会自动和Jetpack一起安装,所以现在可以直接使用ZED SDK了。
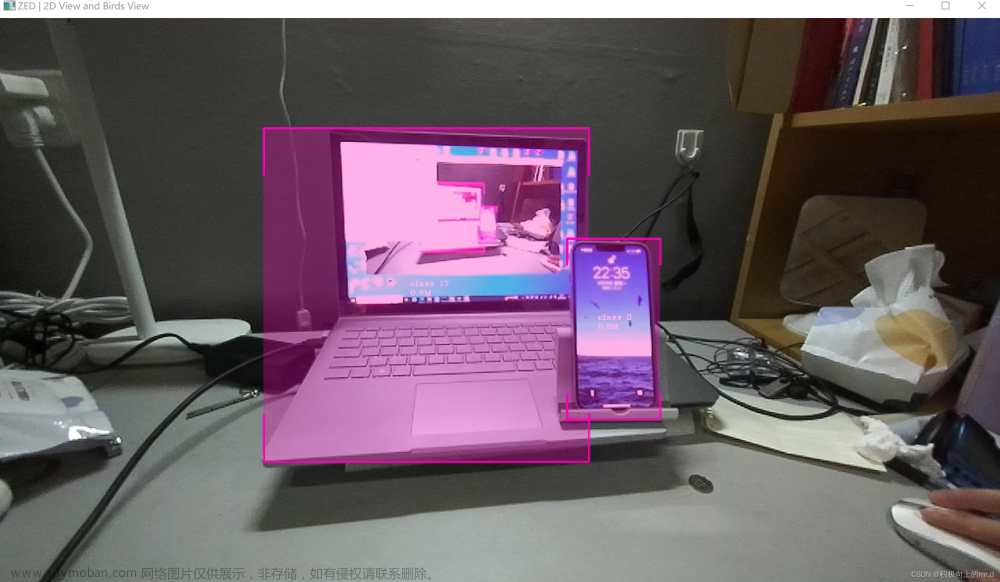
三、运行ZED Explorer
ZED Explorer可以进行实时预览和录制。
可以更改视频分辨率,宽高比和相机参数,捕获高分辨率的图片和3D视频。
位置:
/usr/local/zed/tools/ZED Explorer四、运行ZED Depth Viewer
ZED Depth Viewer可以捕获和显示深度图和3D点云。
尝试不同的深度模式,选择最合适的深度质量/性能比。
位置:
/usr/local/zed/tools/ZED Depth Viewer五、安装ZED Python API
在Linux平台的Python3中使用ZED SDK。
要在Python中使用ZED SDK,需要在系统安装以下依赖项:
ZED SDK
Python3.6+(x64)
Cython 0.26+
Numpy 1.13+
Opencv Python(optional)
PyOpenGL(optional)
确保安装Python(x64版本)和pip包管理器。然后在终端中通过pip安装依赖项:
$ python -m pip install cython numpy opencv-python pyopengl
1、安装Python API
在ZED SDK安装文件夹中的Python脚本可以自动检测平台,CUDA和Python版本,并下载相应的预编译Python API包。
运行安装脚本:
$ cd "/usr/local/zed/"
$ python3 get_python_api.py
# The script displays the detected platform versions
Detected platform:
ubuntu18
Python 3.6
CUDA 11.0
ZED SDK 3.5
# Downloads the corresponding whl package
Checking if https://download.stereolabs.com/zedsdk/3.5/ubuntu18/cu110/py36 exists and is available
Found ! Downloading python package into /usr/local/zed/pyzed-3.5-cp36-cp36m-linux_x86_64.whl
# The script installs the Python API and gives instructions on how to do it manually if needed
Processing ./pyzed-3.5-cp36-cp36m-linux_x86_64.whl
Successfully installed pyzed-3.5
To install it later or on a different environment run :
python -m pip install --ignore-installed /usr/local/zed/pyzed-3.5-cp36-cp36m-linux_x86_64.whl注意:也可以使用虚拟环境,确保在运行脚本前激活它。
2、可能出现的问题
Numpy二进制不兼容
Traceback (most recent call last): ... File "__init__.pxd", line 918, in init pyzed.sl ValueError: numpy.ufunc size changed, may indicate binary incompatibility. Expected 216 from C header, got 192 from PyObject
这个错误通常意味着没有安装Numpy,运行:文章来源:https://www.toymoban.com/news/detail-576621.html
# On Jetson (aarch64) cython needs to be installed first since numpy needs to be compiled.
$ python3 -m pip install cython
$ python3 -m pip install numpy在Jetson(aarch34)上,需要首先安装cython,因为需要编译numpy。文章来源地址https://www.toymoban.com/news/detail-576621.html
到了这里,关于ZED使用指南(一)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!