前言
FreeRTOS是一款广泛使用的开源实时操作系统(RTOS),它为嵌入式系统提供了可靠的任务调度和并发管理。在嵌入式领域中,STM32微控制器广受欢迎,并且与FreeRTOS的结合使用可以提供强大的功能和灵活性。在本篇博客中,我们将深入探究STM32上的FreeRTOS,并了解其核心概念、任务调度算法、任务通信机制以及在实际应用中的使用案例
一、什么是FreeRTOS?
FreeRTOS(Free Real-Time Operating System)是一款开源的实时操作系统(RTOS),专为嵌入式系统设计。它提供了一个可靠的任务调度器和并发管理,使程序员能够轻松地编写多任务、实时应用程序。
FreeRTOS被广泛应用于各种领域,包括工业自动化、医疗设备、消费电子、汽车电子等。该操作系统具有高度可移植性,可以在多种硬件平台上运行,包括STM32微控制器、ARM Cortex-M系列处理器等。
FreeRTOS具有以下特点:
1.简单轻量:FreeRTOS内核代码量小,具有简洁的API和易于使用的接口,适合资源有限的嵌入式系统。
可靠性:FreeRTOS提供了可靠的任务调度器,保证任务按照优先级和时间要求得到及时执行。
2.多任务支持:支持创建多个任务,并通过任务调度算法进行任务切换,实现多任务并发执行。
3.高实时性:FreeRTOS为实时应用提供了可靠的任务调度和响应机制,能够满足实时性要求。
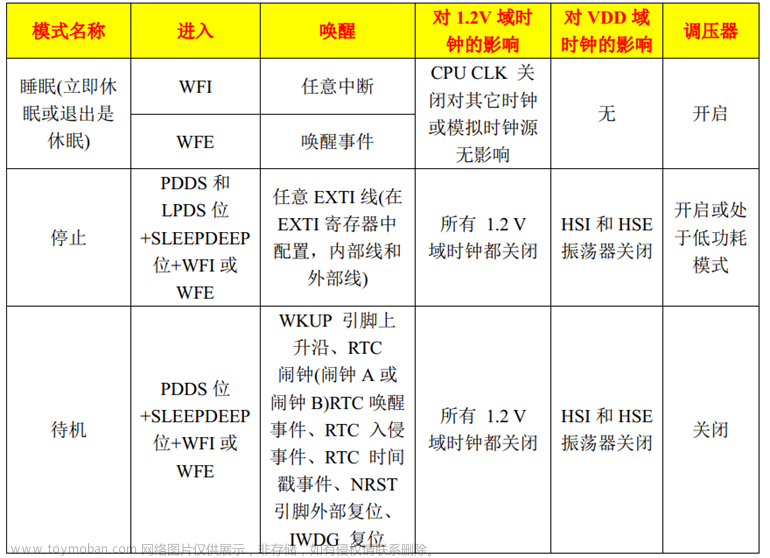
低功耗:FreeRTOS可以根据系统需求进行灵活的电源管理,最大限度地降低功耗。
4.可扩展性:FreeRTOS提供了丰富的组件,如信号量、队列、事件标志等,支持多任务间的通信和同步。
总之,FreeRTOS是一个可靠、高效、灵活的实时操作系统,为嵌入式开发者提供了一个强大的工具来实现复杂的多任务嵌入式应用程序。
二、STM32与FreeRTOS的结合优势
STM32微控制器与FreeRTOS的结合提供了一些重要的优势,使得它们成为嵌入式系统开发中的强大组合。下面是一些主要的优势:
1.强大的任务管理能力:FreeRTOS提供了可靠的任务调度器,可以根据任务的优先级和时间要求进行动态调度。在STM32上使用FreeRTOS,可以轻松创建和管理多个任务,实现任务之间的并发执行。
2.高实时性:由于嵌入式系统通常需要满足实时性要求,STM32微控制器与FreeRTOS的结合可以提供可靠的实时任务调度和响应机制。通过FreeRTOS的抢占式调度算法,可以保证高优先级任务及时响应,确保系统的可靠性和实时性能。
3.良好的硬件兼容性:STM32微控制器广泛应用于嵌入式领域,并且FreeRTOS具有高度可移植性,可以很容易地与不同型号的STM32微控制器集成。官方提供了针对STM32系列的FreeRTOS移植代码和示例,简化了系统开发过程。
4.低功耗支持:STM32微控制器具有出色的低功耗特性,而FreeRTOS提供了灵活的电源管理功能。结合使用,可以最大限度地降低系统的功耗,并满足低功耗应用的需求。
5.丰富的通信和同步机制:FreeRTOS提供了多种通信和同步机制,如信号量、队列、事件标志等,使任务之间可以进行可靠的数据传递和同步操作。这些机制可以很好地支持STM32上复杂的任务间通信和协作。
6.开源社区支持:FreeRTOS是一个开源项目,有庞大的开发者社区支持。这意味着您可以从社区中获取问题解答、代码示例以及与其他开发者的交流,加速开发过程并增加可靠性。
综上所述,STM32与FreeRTOS的结合具有任务管理能力强、实时性高、硬件兼容性好、低功耗支持和丰富的通信同步机制等优势。这使得它们成为嵌入式系统开发中的首选组合,能够满足各种应用的需求。
三、FreeRTOS核心概念
3.1 任务(Tasks)
任务是FreeRTOS中最基本的单位,它代表系统中的一个独立、可执行的工作单元。每个任务都有优先级,并按照其优先级和时间要求进行调度。任务可以是周期性的、一次性的或者是事件驱动的。通过创建多个任务并合理地分配优先级,可以实现复杂的多任务并发执行。
void Task1(void *pvParameters) {
// 任务1的代码逻辑
}
void Task2(void *pvParameters) {
// 任务2的代码逻辑
}
void setup() {
xTaskCreate(Task1, "Task 1", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
xTaskCreate(Task2, "Task 2", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
vTaskStartScheduler();
}
void loop() {
// 不需要执行任何操作
}
在上面的例子中,我们创建了两个任务Task1和Task2,并分别给它们分配了不同的优先级。然后,通过调用vTaskStartScheduler()启动任务调度器,让两个任务并发执行
3.2、 信号量(Semaphores)
信号量是用于任务间同步和互斥的一种机制。它可以用来限制对共享资源的访问,确保任务之间的安全共享。信号量可以有两种类型:二进制信号量和计数信号量。二进制信号量用于互斥访问共享资源,只能为0或1;计数信号量用于限制同时访问共享资源的任务数量。
SemaphoreHandle_t semaphore;
void Task1(void *pvParameters) {
while (1) {
if (xSemaphoreTake(semaphore, portMAX_DELAY) == pdTRUE) {
// 访问共享资源的代码逻辑
xSemaphoreGive(semaphore);
}
}
}
void Task2(void *pvParameters) {
while (1) {
// 产生共享资源的代码逻辑
xSemaphoreGive(semaphore);
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
void setup() {
semaphore = xSemaphoreCreateBinary();
xTaskCreate(Task1, "Task 1", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
xTaskCreate(Task2, "Task 2", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
vTaskStartScheduler();
}
void loop() {
// 不需要执行任何操作
}
在这个例子中,我们创建了一个二进制信号量semaphore来保护共享资源的访问。Task1任务会等待并获取semaphore,然后访问共享资源。Task2任务会定时产生共享资源,并释放semaphore。
3.3、队列(Queues)
队列是FreeRTOS中用于任务间通信的一种机制。它提供了一种有序的方式来传递数据和消息。队列可以是有界队列或无界队列,任务可以发送消息到队列并从队列接收消息。队列的大小可以事先定义或者动态分配。
QueueHandle_t queue;
void Task1(void *pvParameters) {
while (1) {
BaseType_t xStatus;
uint32_t data;
xStatus = xQueueReceive(queue, &data, portMAX_DELAY);
if (xStatus == pdPASS) {
// 处理接收到的数据
}
}
}
void Task2(void *pvParameters) {
while (1) {
uint32_t data = generateData();
BaseType_t xStatus;
xStatus = xQueueSend(queue, &data, pdMS_TO_TICKS(100));
if (xStatus != pdPASS) {
// 发送队列失败的处理逻辑
}
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
void setup() {
queue = xQueueCreate(5, sizeof(uint32_t));
xTaskCreate(Task1, "Task 1", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
xTaskCreate(Task2, "Task 2", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
vTaskStartScheduler();
}
void loop() {
// 不需要执行任何操作
}
这个例子中,我们创建了一个大小为5的队列queue用于任务间的数据传递。Task1任务会等待并接收队列中的数据,然后进行处理。Task2任务会定时产生数据并发送到队列中。
这些示例展示了如何使用FreeRTOS的核心概念来实现任务间的并发执行、共享资源的保护和数据的传递。通过灵活运用这些概念,可以构建出更加复杂和强大的嵌入式系统。
四、总结
FreeRTOS是一款开源的、功能丰富的实时操作系统内核,适用于嵌入式系统和实时应用的开发。它提供了任务调度、信号量、消息队列等核心概念,使多个任务能够并发执行,并可实现任务间的同步与通信。在STM32上使用FreeRTOS可以简化任务管理和资源共享,提高系统的可靠性和性能。
展望:
随着物联网和嵌入式系统的发展,对实时操作系统的需求越来越高。未来,FreeRTOS将继续发展和改进,以满足不断增长的需求。以下是一些可能的展望方向:
支持更多平台:FreeRTOS已经支持众多的微控制器平台,但可以继续扩展支持更多类型的处理器和芯片,以满足更广泛的应用需求。
更强大的调试和性能分析工具:实时系统对调试和性能分析的需求很高,希望有更多的工具和功能来帮助开发人员进行调试、性能分析和优化。
更直观的配置和管理界面:目前,FreeRTOS的配置主要通过修改配置文件进行,希望有更友好和直观的图形界面工具,简化配置和管理流程。
更多的示例和教程:由于FreeRTOS的功能和概念相对复杂,初学者可能难以入门。提供更多的示例和教程,帮助开发人员更好地理解和使用FreeRTOS。文章来源:https://www.toymoban.com/news/detail-576686.html
总之,FreeRTOS作为一款成熟且广泛应用的实时操作系统内核,有着广阔的应用前景。通过不断改进和发展,它将继续满足嵌入式系统和实时应用的需求,并成为开发人员的重要工具之一。文章来源地址https://www.toymoban.com/news/detail-576686.html
到了这里,关于简单介绍STM32上的FreeRTOS实时操作系统的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!