OpenMV与STM32之间使用串口进行通信。
OpenMV
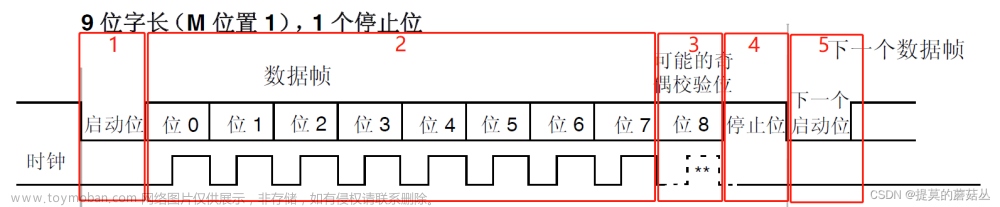
详细解释可以看代码里面的注释。注意:转换成字节型传输时,负数会以补码形式传输,比如:-1在单片机接受时变成255.
import sensor, image, time, math#调用声明
from pyb import UART #串口
uart = UART(3, 115200, timeout_char=1000) # i使用给定波特率初始化
uart.init(115200, bits=8, parity=None, stop=1, timeout_char=1000)
#这一行一定要写!!
#设置帧头和帧尾,便于接受方接收数据
u_start=bytearray([0xb3,0xb3])
u_over=bytearray([0x0d,0x0a])
# Camera setup...
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use grayscale.
sensor.set_framesize(sensor.QVGA) # use QQVGA for speed.
sensor.skip_frames(30) # Let new settings take affect.
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
#关闭白平衡
clock = time.clock() # Tracks FPS.
mark=([-1,-1],[-1,-1],[-1,-1])
while(True):
times=0
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot()# Take a picture and return the image.
row_data=[0,0,0,0]
#row_data里面存放需要返回的数据,长度可以根据需要调整
#print(row_data)
uart_buf = bytearray(row_data) #转换成字节型
uart.write(u_start) #先发帧头,再发数据,最后发帧尾
uart.write(uart_buf)
uart.write(u_over)
#print(clock.fps())
STM32
先在项目中加入串口通信包,PA2为TXD,PA3为RXD。可以开一个串口通过串口助手打印接收到的数据。注意:OpenMV的TXD和RXD口可以查看官网的手册,OpenMV的TXD接单片机RXD,OpenMV的RXD接单片机TXD。!!小心OpenMV给单片机反向供电,OpenMV通过数据线接电脑时务必把VCC线拔掉。!!注意共地,不然数据传不过去。
UART2.c
#include "sys.h"
#include "USART2.h"
#include "stm32f4xx.h"
u8 USART2_RX_BUF[USART2_REC_LEN];
u16 USART2_RX_STA=0;
void uart2_init(u32 bound){
//GPIO????
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);
//??2????????
GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_USART2);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource3,GPIO_AF_USART2);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA,&GPIO_InitStructure); //???
//??2?????
USART_InitStructure.USART_BaudRate = bound;//?????
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//???8?????
USART_InitStructure.USART_StopBits = USART_StopBits_1;//?????
USART_InitStructure.USART_Parity = USART_Parity_No;//??????
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//????????
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //????
USART_Init(USART2, &USART_InitStructure); //?????2
//??2 NVIC ??
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//??2????
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//?????3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //????3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ????
NVIC_Init(&NVIC_InitStructure); //??????????VIC???
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//??????
USART_Cmd(USART2, ENABLE); //????1
}
void USART2_IRQHandler(void) //??2??????
{
u8 Res;
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //????(?????????0x0d 0x0a??)
{
Res =USART_ReceiveData(USART2);//(USART1->DR); //????????
if((USART2_RX_STA&0x8000)==0)//?????
{
if(USART2_RX_STA&0x4000)//????0x0d
{
if(Res!=0x0a)USART2_RX_STA=0;//????,????
else USART2_RX_STA|=0x8000; //?????
}
else //???0X0D
{
if(Res==0x0d)USART2_RX_STA|=0x4000;
else
{
USART2_RX_BUF[USART2_RX_STA&0X3FFF]=Res ;
USART2_RX_STA++;
if(USART2_RX_STA>(USART2_REC_LEN-1))USART2_RX_STA=0;//??????,??????
}
}
}
}
}
UART2.h文章来源:https://www.toymoban.com/news/detail-579366.html
#ifndef __USART2_H
#define __USART2_H
#include "stdio.h"
#include "stm32f4xx_conf.h"
#include "sys.h"
#define USART2_REC_LEN 200
extern u8 USART2_RX_BUF[USART2_REC_LEN];
extern u16 USART2_RX_STA;
void uart2_init(u32 bound);
#endif
main.c文章来源地址https://www.toymoban.com/news/detail-579366.html
#include "stm32f4xx.h"
#include "usart.h"
#include "delay.h"
#include "initGPIO.h"
#include "USART2.h"
#include "math.h"
#include "stdlib.h"
#define num_pul 1
#define move_time_ms 1
#define len_things 4
#define delay_time_ms 5
extern u16 TIM5_Flag;
u8 row_data[200];//接受已经收到的数字;
void get_data()//获得PA2、PA3传回的数据;
{
u8 t,n=0;
u8 len=0;
if(USART2_RX_STA&0x8000)
{
len=USART2_RX_STA&0x3fff;
for(t=0;t<len;t++)//检测到开头数字,并开始记录数据;
{
if(USART2_RX_BUF[t]==0xb3)
{
if(USART2_RX_BUF[t+1]==0xb3)
{
n=t+2;
break;
}
}
}
for(t=0;n<len;t++,n++)
{
row_data[t] = USART2_RX_BUF[n];
printf("row_data%d:%d ",t+1,row_data[t]);
}
printf("\r\n");
USART2_RX_STA=0;
}
}
int main(void)
{
uart2_init(115200);
uart_init(115200);
while(1)
{
//后续操作
}
}
到了这里,关于OpenMV与STM32之间的通信的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!