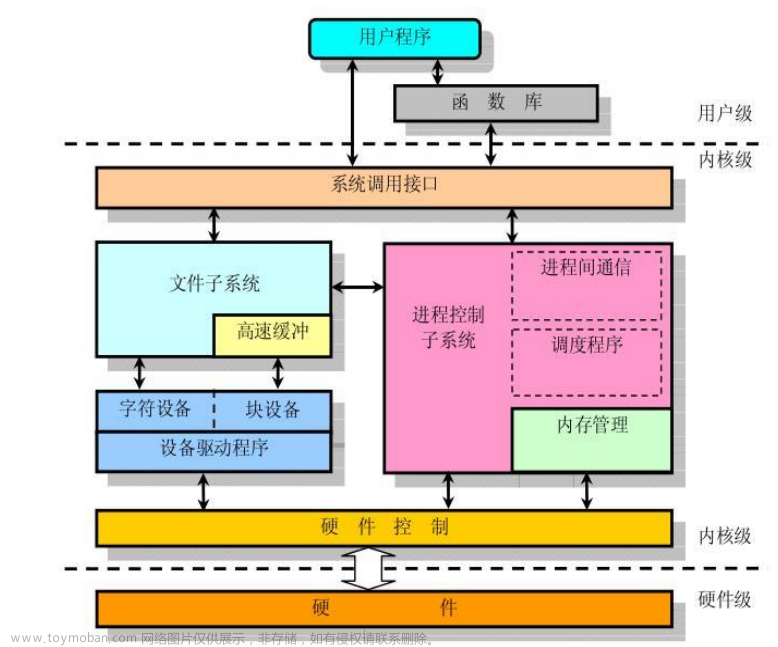
前面我们介绍了Linux设备模型、平台设备驱动、设备树(device tree)、GPIO子系统以及pinctrl子系统等,大家看这篇文章之前需要提前知道的基础都在这篇文章中:
Linux设备模型、平台设备驱动、设备树(device tree)、GPIO子系统以及pinctrl子系统介绍
有部分函数没有涉及到的最后会讲解。
一、配置连接说明
我们做控制led灯的时候用的是下面三个管脚:
控制LED灯连接实图:
二、更新设备树
(1)将led灯引脚添加到pinctrl子系统
将我们的引脚添加到 igkboard.dts 下的 &iomuxc 节点下:
pinctrl_my_gpio_leds: my-gpio-leds {
fsl,pins = <
MX6UL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x17059 /* led run */
MX6UL_PAD_SNVS_TAMPER1__GPIO5_IO01 0x17059
MX6UL_PAD_JTAG_MOD__GPIO1_IO10 0x17059
>;
};
引脚定义都是在文件::~/imx6ull/imx6ull/bsp/kernel/linux-imx/arch/arm/boot/dts下可以查看:
wangdengtao@wangdengtao-virtual-machine:~/imx6ull/imx6ull/bsp/kernel/linux-imx/arch/arm/boot/dts$ cat imx6ul-pinfunc.h
/* SPDX-License-Identifier: GPL-2.0-only */
/*
* Copyright 2014 - 2015 Freescale Semiconductor, Inc.
*/
#ifndef __DTS_IMX6UL_PINFUNC_H
#define __DTS_IMX6UL_PINFUNC_H
/*
* The pin function ID is a tuple of
* <mux_reg conf_reg input_reg mux_mode input_val>
*/
#define MX6UL_PAD_BOOT_MODE0__GPIO5_IO10 0x0014 0x02a0 0x0000 5 0
#define MX6UL_PAD_BOOT_MODE1__GPIO5_IO11 0x0018 0x02a4 0x0000 5 0
#define MX6UL_PAD_SNVS_TAMPER1__GPIO5_IO01 0x0020 0x02ac 0x0000 5 0
#define MX6UL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x003c 0x02c8 0x0000 5 0
#define MX6UL_PAD_SNVS_TAMPER0__GPIO5_IO00 0x001c 0x02a8 0x0000 5 0
#define MX6UL_PAD_JTAG_MOD__GPIO1_IO10 0x0044 0x02d0 0x0000 5 0
(2)设备树中添加LDE灯的设备树节点
将我们的 my_leds 设备节点添加在 igkbosrd.dts 的根节点下:
my_leds {
compatible = "my-gpio-leds"; /*设置“compatible”属性值,与led的平台驱动做匹配*/
pinctrl-names = "default"; /*定义引脚状态*/
pinctrl-0 = <&pinctrl_my_gpio_leds>; /*指定LED灯的引脚pinctrl信息*/
status = "okay";
led-gpios = <&gpio5 8 GPIO_ACTIVE_HIGH>,/*指定引脚使用的哪个GPIO 引脚名字= <&GPIO组 GPIO编号 有效电平>*/
<&gpio5 1 GPIO_ACTIVE_HIGH>,
<&gpio1 10 GPIO_ACTIVE_HIGH>;
default-state = "off";
};
(3)编译更新设备树
添加完成之后我们需要去 linux-imx 文件夹下执行 make dtbs 编译一下我们的设备树,然后将开发板上如下的文件路径下的 igkboard.dtb 以及 zImage(linux下的zImage文件再/bootl路径下) 修改。
wangdengtao@wangdengtao-virtual-machine:~/imx6ull/imx6ull/bsp/kernel/linux-imx$ make dtbs
root@igkboard:~# find / -name zImage
/run/media/mmcblk1p1/zImage
root@igkboard:~# find / -name igkboard.dtb
/run/media/mmcblk1p1/igkboard.dtb
替换之后执行 sudo reboot 即可。
使用新的设备树重新启动之后正常情况下会在开发板的 “/proc/device-tree” 目录下生成 “my_leds” 设备树节点。如下所示。
root@igkboard:~# cd /proc/device-tree/
root@igkboard:/proc/device-tree# ls
'#address-cells' 3p3v backlight-lcd clock-di0 compatible leds mqs panel pxp_v4l2 regulator@0 soc w1
'#size-cells' __symbols__ chosen clock-di1 cpus memory@80000000 my_leds pmu regulator-peri-3v3 reserved-memory sound-mqs
1p8v aliases clock-cli clock-osc keys model name pwm-buzzer regulator-sd1-vmmc serial-number timer
进入节点文件我们可以看到我们设置的gpio子系统的属性:
root@igkboard:/proc/device-tree# cd my_leds/
root@igkboard:/proc/device-tree/my_leds# ls
compatible default-state led-gpios name pinctrl-0 pinctrl-names status
三、驱动开发与测试
(1)编写设备驱动代码
代码中涉及到的字符设备驱动不了解的可以参考这篇文章:Linux下字符设备驱动开发以及流程介绍
/*************************************************************************
> File Name: led_gpio.c
> Author: WangDengtao
> Mail: 1799055460@qq.com
> Created Time: 2023年03月21日 星期二 13时55分02秒
************************************************************************/
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio.h>
#include <linux/gpio/consumer.h>
#include <linux/of_gpio.h>
#include <linux/platform_device.h>
/*如果没有定义DEV_MAJOR就设置设备号为0,采用动态申请,如果有则使用宏定义的设备号*/
//#define DEV_MAJOR 88
#ifndef DEV_MAJOR
#define DEV_MAJOR 0
#endif
#define PLATDRV_MAGIC 0x60 //魔术字
#define LED_OFF _IO (PLATDRV_MAGIC, 0x18)
#define LED_ON _IO (PLATDRV_MAGIC, 0x19)
#define DEV_NAME "my_led" /*宏定义设备的名字*/
int dev_major = DEV_MAJOR;
/*led设备初始化*/
struct led_device {
dev_t devid; /* 设备号 */
struct cdev *cdev; /*cdev结构体*/
struct class *class; /*定义一个class用于创建类 */
struct device *device; /*设备 */
struct device_node *node; /* led设备节点 */
struct gpio_desc *led_gpio1,*led_gpio2,*led_gpio3; /*led灯GPIO描述符 */
}led_dev;
/*字符设备操作函数集,open函数*/
static int led_open(struct inode *inode, struct file *file)
{
file->private_data = &led_dev; //设置私有数据
printk(KERN_DEBUG "/dev/led%d opened.\n", led_dev.devid);
return 0;
}
/*字符设备操作函数集,close函数*/
static int led_release(struct inode *inode, struct file *file)
{
printk(KERN_DEBUG "/dev/led%d opened.\n", led_dev.devid);
return 0;
}
static void print_led_help(void)
{
printk("Follow is the ioctl() command for LED driver:\n");
printk("Turn LED on command : %u\n", LED_ON);
printk("Turn LED off command : %u\n", LED_OFF);
}
/*字符设备操作函数集,ioctl函数*/
static long led_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
if(cmd == LED_OFF)/* variable case */
{
if(arg == 1)
{
gpiod_set_value(led_dev.led_gpio1, 0);
}
else if(arg == 2)
{
gpiod_set_value(led_dev.led_gpio2, 0);
}
else if(arg == 3)
{
gpiod_set_value(led_dev.led_gpio3, 0);
}
else
{
printk("arg argument 1 2 3\n");
return -EINVAL;
}
}
else if(cmd == LED_ON)
{
if(arg == 1)
{
gpiod_set_value(led_dev.led_gpio1, 1);
}
else if(arg == 2)
{
gpiod_set_value(led_dev.led_gpio2, 1);
}
else if(arg == 3)
{
gpiod_set_value(led_dev.led_gpio3, 1);
}
else
{
printk("arg argument 1 2 3\n");
return -EINVAL;
}
}
else
{
printk("%s driver don't support ioctl command=%d\n", DEV_NAME, cmd);
print_led_help();
return -EINVAL;
}
return 0;
}
/*字符设备操作函数集*/
static struct file_operations led_fops = {
.owner = THIS_MODULE,
.open = led_open,
.release = led_release,
.unlocked_ioctl = led_ioctl,
};
/*驱动安装函数*/
static int led_probe(struct platform_device * pdev)
{
int result= 0;
/*获取led的设备树节点,该函数适用于只有一个gpio,index为0*/
//led_dev.led_gpio = gpiod_get(&pdev -> dev, "led", 0);
led_dev.led_gpio1 = gpiod_get_index(&pdev -> dev, "led", 0, GPIOD_OUT_HIGH);
led_dev.led_gpio2 = gpiod_get_index(&pdev -> dev, "led", 1, GPIOD_OUT_HIGH);
led_dev.led_gpio3 = gpiod_get_index(&pdev -> dev, "led", 2, GPIOD_OUT_HIGH);
if(IS_ERR(led_dev.led_gpio1))
{
printk("gpiod request failure\n");
return -1;
}
/*设置GPIO的方向为输出状态,默认为低电平*/
result = gpiod_direction_output(led_dev.led_gpio1, 0);
gpiod_direction_output(led_dev.led_gpio2, 0);
gpiod_direction_output(led_dev.led_gpio3, 0);
if(0 != result )
{
printk("gpiod direction output set failure\n");
return result;
}
/*字符设备驱动注册的流程一:分配主次设备号,这里不仅支持静态指定,也支持动态申请*/
/*静态申请主次设备号*/
if(0 != dev_major)
{
led_dev.devid = MKDEV(dev_major, 0);//将主设备号dev_major和从设备号0分配给devno变量
result = register_chrdev_region(led_dev.devid, 1, DEV_NAME);//请求分配一个设备号,名字为DEV_NAME(chardev),设备号是:88 0
}
/*动态申请*/
else
{
result = alloc_chrdev_region(&led_dev.devid, 0, 1, DEV_NAME);//求分配一个名字为wangdengtao_dev的设备号,从设备号为0,保存到devid变量中
dev_major = MAJOR(led_dev.devid);//获取设备号
}
/*失败后的处理结果,总规上面只执行一次,所以直接在外面判断就可*/
if(result < 0)
{
printk(KERN_ERR " %s chardev can't use major %d\n", DEV_NAME, dev_major);
return -result;
}
printk("%s driver use major %d\n", DEV_NAME, dev_major);
/*字符串设备驱动流程三:分配cdev结构体,使用动态申请的方式*/
/*
内核在内部使用类型struct cdev的结构体来代表字符设备。在内核调用你的设备操作之前,你必须分配
一个这样的结构体并注册给linux内核,在这个结构体里有对于这个设备进行操作的函数,具体定义在
file_operation结构体中。
*/
if(NULL == (led_dev.cdev = cdev_alloc()))
{
printk(KERN_ERR "%s driver can't alloc for the cdev\n", DEV_NAME);
unregister_chrdev_region(led_dev.devid, 1);//释放掉设备号
return -ENOMEM;
}
/*字符设备驱动流程三:分配cdev结构体,绑定主次设备号,fops到cdev结构体中,并且注册到linux内核*/
led_dev.cdev -> owner = THIS_MODULE; /*.owner这表示谁拥有这个驱动程序*/
cdev_init(led_dev.cdev, &led_fops);/*初始化设备*/
result = cdev_add(led_dev.cdev, led_dev.devid, 1); /*将字符设备注册进内核*/
if(0 != result)
{
printk(KERN_INFO "%s driver can't register cdev:result = %d\n", DEV_NAME, result);
goto ERROR;
}
printk(KERN_INFO "%s driver can register cdev:result = %d\n", DEV_NAME, result);
/*自动创建设备类型、/dev设备节点*/
led_dev.class = class_create(THIS_MODULE, DEV_NAME); /*创建设备类型sys/class/chrdev*/
if (IS_ERR(led_dev.class))
{
printk("%s driver create class failure\n", DEV_NAME);
result = -ENOMEM;
goto ERROR;
}
/*/dev/chrdev 注册这个设备节点*/
led_dev.device = device_create(led_dev.class, NULL, led_dev.devid, NULL, DEV_NAME);
if(IS_ERR(led_dev.device))
{
result = -ENOMEM;//返回错误码,应用空间strerror查看
goto ERROR;
}
return 0;
ERROR:
printk(KERN_ERR" %s driver installed failure.\n", DEV_NAME);
cdev_del(led_dev.cdev);
unregister_chrdev_region(led_dev.devid, 1);
return result;
}
static int led_remove(struct platform_device *pdev)
{
gpiod_set_value(led_dev.led_gpio1, 0); //低电平关闭灯
gpiod_set_value(led_dev.led_gpio2, 0); //低电平关闭灯
gpiod_set_value(led_dev.led_gpio3, 0); //低电平关闭灯
gpiod_put(led_dev.led_gpio1); //释放gpio
gpiod_put(led_dev.led_gpio2); //释放gpio
gpiod_put(led_dev.led_gpio3); //释放gpio
cdev_del(led_dev.cdev); //删除cdev
unregister_chrdev_region(led_dev.devid, 1);//释放设备号
device_destroy(led_dev.class, led_dev.devid);//注销设备
class_destroy(led_dev.class); //注销类
return 0;
}
static const struct of_device_id leds_match_table[] = {
{.compatible = "my-gpio-leds"},
{/* sentinel */},
};
MODULE_DEVICE_TABLE(of, leds_match_table);
/*内核中使用platform_driver结构体来描述平台驱动*/
static struct platform_driver gpio_led_driver =
{
.probe = led_probe, //安装驱动的时候会执行的函数
.remove = led_remove, //驱动卸载的时候会执行的函数
.driver = { //描述驱动的属性
.name = "my_led", //name域
.owner = THIS_MODULE, //使用者,一般都是THIS_MODULE
.of_match_table = leds_match_table, //驱动能够兼容的设备类型
},
};
/*入口函数*/
static int __init platdrv_led_init(void)
{
int rv;
/*
当我们初始化了platform_driver之后,通过platform_driver_register()函数来注册我们的平台驱动;
成功注册了一个平台驱动后,就会在/sys/bus/platform/driver目录下生成一个新的目录项.
成功: 0
失败: 负数
*/
rv = platform_driver_register(&gpio_led_driver);
if(rv < 0)
{
printk(KERN_ERR "%s:%d: Can't register platform driver %d \n", __FUNCTION__, __LINE__, rv);
return rv;
}
printk("Regist LED Platform Driver successfully!\n ");
return 0;
}
/*出口函数*/
static void __exit platdrv_led_exit(void)
{
printk("%s: %d remove LED platform driver\n", __FUNCTION__, __LINE__);
/*卸载的驱动模块时,需要注销掉已注册的平台驱动*/
platform_driver_unregister(&gpio_led_driver);
}
/*调用函数 module_init 来声明 xxx_init 为驱动入口函数,当加载驱动的时候 xxx_init函数就会被调用.*/
module_init(platdrv_led_init);
/*调用函数module_exit来声明xxx_exit为驱动出口函数,当卸载驱动的时候xxx_exit函数就会被调用.*/
module_exit(platdrv_led_exit);
/*添加LICENSE和作者信息,是来告诉内核,该模块带有一个自由许可证;没有这样的说明,在加载模块的时内核会“抱怨”.*/
MODULE_LICENSE("Dual BSD/GPL");//许可 GPL、GPL v2、Dual MPL/GPL、Proprietary(专有)等,没有内核会提示.
MODULE_AUTHOR("WangDengtao");//作者
MODULE_VERSION("V1.0");//版本
(2)编写驱动测试代码
/*************************************************************************
> File Name: led_gpio_test.c
> Author: WangDengtao
> Mail: 1799055460@qq.com
> Created Time: 2023年03月23日 星期四 10时46分40秒
************************************************************************/
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/select.h>
#define LED_CNT 1
#define DEVNAME_LEN 30
#define PLATDRV_MAGIC 0x60
#define LED_OFF _IO (PLATDRV_MAGIC, 0x18)
#define LED_ON _IO (PLATDRV_MAGIC, 0x19)
static void msleep(unsigned long ms)
{
struct timeval tv;
tv.tv_sec = ms/1000;
tv.tv_usec = (ms%1000)*1000;
select(0, NULL, NULL, NULL, &tv);
}
int main(int argc, char **argv)
{
int fd[LED_CNT];
char dev_name[DEVNAME_LEN];
memset(dev_name, 0, sizeof(dev_name));
snprintf(dev_name, sizeof(dev_name), "/dev/my_led");
fd[LED_CNT] = open(dev_name, O_RDWR, 0755);
if(fd[LED_CNT] < 0)
{
printf("file %s open failure!\n", dev_name);
goto err;
}
printf("open fd[%d] successfully.\n", fd[LED_CNT]);
while(1)
{
ioctl(fd[LED_CNT], LED_ON, 1);
msleep(500);
ioctl(fd[LED_CNT], LED_OFF, 1);
ioctl(fd[LED_CNT], LED_ON, 2);
msleep(500);
ioctl(fd[LED_CNT], LED_OFF, 2);
ioctl(fd[LED_CNT], LED_ON, 3);
msleep(500);
ioctl(fd[LED_CNT], LED_OFF, 3);
msleep(500);
}
close(fd[LED_CNT]);
return 0;
err:
close(fd[LED_CNT]);
return -1;
}
(3)Makefile
同时编译驱动文件以及测试文件,编译运行之后我们可以看见可执行文件以及.ko文件。
KERNAL_DIR ?= /home/wangdengtao/imx6ull/imx6ull/bsp/kernel/linux-imx
PWD :=$(shell pwd)
obj-m := led_gpio.o
CC=arm-linux-gnueabihf-gcc
APP_NAME=led_gpio_test
all:
$(MAKE) -C $(KERNAL_DIR) M=$(PWD) modules
@${CC} ${APP_NAME}.c -o ${APP_NAME}
@make clear
clear:
@rm -f *.o *.cmd *.mod *.mod.c
@rm -rf *~ core .depend .tmp_versions Module.symvers modules.order -f
@rm -f .*ko.cmd .*.o.cmd .*.o.d
@rm -f *.unsigned
clean:
@rm -f *.ko
@rm -f ${APP_NAME}
wangdengtao@wangdengtao-virtual-machine:~/wangdengtao/driver/arm$ make
make -C /home/wangdengtao/imx6ull/imx6ull/bsp/kernel/linux-imx M=/home/wangdengtao/wangdengtao/driver/arm modules
make[1]: 进入目录“/home/wangdengtao/imx6ull/imx6ull/bsp/kernel/linux-imx”
CC [M] /home/wangdengtao/wangdengtao/driver/arm/led_gpio.o
MODPOST /home/wangdengtao/wangdengtao/driver/arm/Module.symvers
CC [M] /home/wangdengtao/wangdengtao/driver/arm/led_gpio.mod.o
LD [M] /home/wangdengtao/wangdengtao/driver/arm/led_gpio.ko
make[1]: 离开目录“/home/wangdengtao/imx6ull/imx6ull/bsp/kernel/linux-imx”
make[1]: 进入目录“/home/wangdengtao/wangdengtao/driver/arm”
make[1]: 离开目录“/home/wangdengtao/wangdengtao/driver/arm”
wangdengtao@wangdengtao-virtual-machine:~/wangdengtao/driver/arm$ ls
led_gpio.c led_gpio.ko led_gpio_test led_gpio_test.c Makefile
将我们的可执行文件以及.ko文件上传到开发板:
root@igkboard:~# tftp -gr led_gpio.ko 192.168.137.8
root@igkboard:~# tftp -gr led_gpio_test 192.168.137.8
root@igkboard:~# ls
led_gpio.ko led_gpio_test
四、结果展示
安装我们的驱动,可以看见在 /dev 路径下生成的设备树文件 my_led。
root@igkboard:~# insmod led_gpio.ko
root@igkboard:~# lsmod
Module Size Used by
led_gpio 16384 0
rtl8188fu 999424 0
imx_rngc 16384 0
rng_core 20480 1 imx_rngc
secvio 16384 0
error 20480 1 secvio
root@igkboard:~# ls -l /dev/my_led
crw------- 1 root root 243, 0 Mar 25 08:49 /dev/my_led
执行我们的测试代码,我们可以看见我们的led灯隔5毫秒闪烁了:
root@igkboard:~# ./led_gpio_test
open fd[3] successfully.
最后卸载我们的驱动:
root@igkboard:~# rmmod led_gpio
root@igkboard:~# lsmod
Module Size Used by
rtl8188fu 999424 0
imx_rngc 16384 0
rng_core 20480 1 imx_rngc
secvio 16384 0
error 20480 1 secvio

五、ioctl接口讲解
大部分驱动需要除了读写设备的能力,还需要有通过设备驱动进行各种硬件控制的能力。
ioctl 驱动函数:
int (*ioctl) (struct inode *inode, struct file *filp, unsigned int cmd, unsigned long arg);
- inode:和 filp 指针是对应应用程序传递的文件描述符 fd 的值, 和传递给 open 方法的相同参数。
- cmd:参数从用户那里不改变地传下来,并且可选的参数。
- arg:参数以一个 unsigned long 的形式传递, 不管它是否由用户给定为一个整数或一个指针。
为了保证 cmd 命令的唯一性(类似于现实中的身份证)。
wangdengtao@wangdengtao-virtual-machine:~$ cat /opt/TuxamitoSoftToolchains/arm-arm1176jzfssf-linux-gnueabi/gcc-4.6.4/arm-arm1176jzfssf-linux-gnueabi/sysroot/usr/include/asm-generic/ioctl.h
#ifndef _ASM_GENERIC_IOCTL_H
#define _ASM_GENERIC_IOCTL_H
/* ioctl command encoding: 32 bits total, command in lower 16 bits,
* size of the parameter structure in the lower 14 bits of the
* upper 16 bits.
* Encoding the size of the parameter structure in the ioctl request
* is useful for catching programs compiled with old versions
* and to avoid overwriting user space outside the user buffer area.
* The highest 2 bits are reserved for indicating the ``access mode''.
* NOTE: This limits the max parameter size to 16kB -1 !
*/
/*
* The following is for compatibility across the various Linux
* platforms. The generic ioctl numbering scheme doesn't really enforce
* a type field. De facto, however, the top 8 bits of the lower 16
* bits are indeed used as a type field, so we might just as well make
* this explicit here. Please be sure to use the decoding macros
* below from now on.
*/
#define _IOC_NRBITS 8
#define _IOC_TYPEBITS 8
/*
* Let any architecture override either of the following before
* including this file.
*/
#ifndef _IOC_SIZEBITS
# define _IOC_SIZEBITS 14
#endif
#ifndef _IOC_DIRBITS
# define _IOC_DIRBITS 2
#endif
#define _IOC_NRMASK ((1 << _IOC_NRBITS)-1)
#define _IOC_TYPEMASK ((1 << _IOC_TYPEBITS)-1)
#define _IOC_SIZEMASK ((1 << _IOC_SIZEBITS)-1)
#define _IOC_DIRMASK ((1 << _IOC_DIRBITS)-1)
#define _IOC_NRSHIFT 0
#define _IOC_TYPESHIFT (_IOC_NRSHIFT+_IOC_NRBITS)
#define _IOC_SIZESHIFT (_IOC_TYPESHIFT+_IOC_TYPEBITS)
#define _IOC_DIRSHIFT (_IOC_SIZESHIFT+_IOC_SIZEBITS)
/*
* Direction bits, which any architecture can choose to override
* before including this file.
*/
#ifndef _IOC_NONE
# define _IOC_NONE 0U
#endif
#ifndef _IOC_WRITE
# define _IOC_WRITE 1U
#endif
#ifndef _IOC_READ
# define _IOC_READ 2U
#endif
#define _IOC(dir,type,nr,size) \
(((dir) << _IOC_DIRSHIFT) | \
((type) << _IOC_TYPESHIFT) | \
((nr) << _IOC_NRSHIFT) | \
((size) << _IOC_SIZESHIFT))
#define _IOC_TYPECHECK(t) (sizeof(t))
/* used to create numbers */
#define _IO(type,nr) _IOC(_IOC_NONE,(type),(nr),0)
#define _IOR(type,nr,size) _IOC(_IOC_READ,(type),(nr),(_IOC_TYPECHECK(size)))
#define _IOW(type,nr,size) _IOC(_IOC_WRITE,(type),(nr),(_IOC_TYPECHECK(size)))
#define _IOWR(type,nr,size) _IOC(_IOC_READ|_IOC_WRITE,(type),(nr),(_IOC_TYPECHECK(size)))
#define _IOR_BAD(type,nr,size) _IOC(_IOC_READ,(type),(nr),sizeof(size))
#define _IOW_BAD(type,nr,size) _IOC(_IOC_WRITE,(type),(nr),sizeof(size))
#define _IOWR_BAD(type,nr,size) _IOC(_IOC_READ|_IOC_WRITE,(type),(nr),sizeof(size))
/* used to decode ioctl numbers.. */
#define _IOC_DIR(nr) (((nr) >> _IOC_DIRSHIFT) & _IOC_DIRMASK)
#define _IOC_TYPE(nr) (((nr) >> _IOC_TYPESHIFT) & _IOC_TYPEMASK)
#define _IOC_NR(nr) (((nr) >> _IOC_NRSHIFT) & _IOC_NRMASK)
#define _IOC_SIZE(nr) (((nr) >> _IOC_SIZESHIFT) & _IOC_SIZEMASK)
/* ...and for the drivers/sound files... */
#define IOC_IN (_IOC_WRITE << _IOC_DIRSHIFT)
#define IOC_OUT (_IOC_READ << _IOC_DIRSHIFT)
#define IOC_INOUT ((_IOC_WRITE|_IOC_READ) << _IOC_DIRSHIFT)
#define IOCSIZE_MASK (_IOC_SIZEMASK << _IOC_SIZESHIFT)
#define IOCSIZE_SHIFT (_IOC_SIZESHIFT)
#endif /* _ASM_GENERIC_IOCTL_H */
在驱动程序里, ioctl() 函数上传送的变量 cmd 是应用程序用于区别设备驱动程序请求处理内容的值。cmd除了可区别数字外,还包含有助于处理的几种相应信息。 cmd的大小为 32位,共分 4 个域:
bit31~bit30 2位为 “区别读写” 区,作用是区分是读取命令还是写入命令。
bit29~bit15 14位为 “数据大小” 区,表示 ioctl() 中的 arg 变量传送的内存大小。
bit20~bit08 8位为 “魔数"(也称为"幻数")区,这个值用以与其它设备驱动程序的 ioctl 命令进行区别。
bit07~bit00 8位为 “区别序号” 区,是区分命令的命令顺序序号。
内核定义了 _IO() , _IOR() , IOW() 和 _IOWR() 这 4 个宏来辅助生成上面的 cmd 。下面分析 _IO() 的实现。
上面的代码中可以看见_IO的定义以及_IOC的定义:
#define _IO(type,nr) _IOC(_IOC_NONE,(type),(nr),0)
#define _IOC(dir,type,nr,size) \
(((dir) << _IOC_DIRSHIFT) | \
((type) << _IOC_TYPESHIFT) | \
((nr) << _IOC_NRSHIFT) | \
((size) << _IOC_SIZESHIFT))
#ifndef _IOC_NONE
# define _IOC_NONE 0U
#endif
#define _IOC_TYPESHIFT (_IOC_NRSHIFT+_IOC_NRBITS) //8
#define _IOC_SIZESHIFT (_IOC_TYPESHIFT+_IOC_TYPEBITS) //16
#define _IOC_DIRSHIFT (_IOC_SIZESHIFT+_IOC_SIZEBITS) //30
#define _IOC_NRSHIFT 0
#define _IOC_NRBITS 8
#define _IOC_TYPEBITS 8
(dir) << _IOC_DIRSHIFT) dir 往左移 30 位,即移到 bit31~bit30 两位上,得到方向(读写)的属性
(size) << _IOC_SIZESHIFT) 位左移 16 位得到“数据大小”区
(type) << _IOC_TYPESHIFT) 左移 8位得到"魔数区"
(nr) << _IOC_NRSHIFT) 左移 0 位( bit7~bit0)
前面代码中我们使用的宏定义解释:
#define PLATDRV_MAGIC 0x60
#define LED_OFF _IO (PLATDRV_MAGIC, 0x18)
#define LED_ON _IO (PLATDRV_MAGIC, 0x19)
_IO (魔数, 基数):
魔数 (magic number)
魔数范围为 0~255 。通常,用英文字符 “A” ~ “Z” 或者 “a” ~ “z” 来表示。设备驱动程序从传递进来的命令获取魔数,然后与自身处理的魔数想比较,如果相同则处理,不同则不处理。魔数是拒绝误使用的初步辅助状态。设备驱动 程序可以通过 _IOC_TYPE (cmd) 来获取魔数。不同的设备驱动程序最好设置不同的魔数,但并不是要求绝对,也是可以使用其他设备驱动程序已用过的魔数。
基(序列号)数文章来源:https://www.toymoban.com/news/detail-582399.html
基数用于区别各种命令。通常,从 0开始递增,相同设备驱动程序上可以重复使用该值。例如,读取和写入命令中使用了相同的基数,设备驱动程序也能分辨出来,原因在于设备驱动程序区分命令时 使用 switch ,且直接使用命令变量 cmd值。创建命令的宏生成的值由多个域组合而成,所以即使是相同的基数,也会判断为不同的命令。设备驱动程序想要从命令中获取该基数,就使用下面的宏:_IOC_NR (cmd) 文章来源地址https://www.toymoban.com/news/detail-582399.html
到了这里,关于Linux下LED设备驱动开发(LED灯实现闪烁)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!