前言:
本小结主要实现串口打印功能,主要将上一结的状态机运行次数,通过串口在串口终端上打印出来,硬件电路上主要是TTL转USB驱动电路,软件上主要有状态机函数,串口发送函数等调试工具是串口助手。
目录
1.硬件电路
2.串口讲解
2.1定义
2.2协议
3.软件编程
3.1参数配置
3.2程序结构
3.2.1程序框架
3.2.2打印配置
3.2.3串口发送配置
4.效果展示
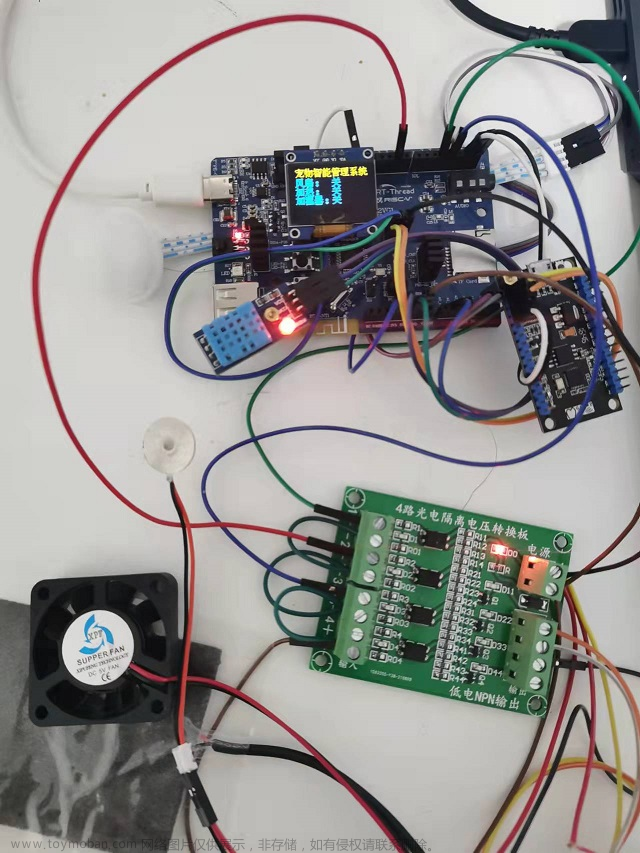
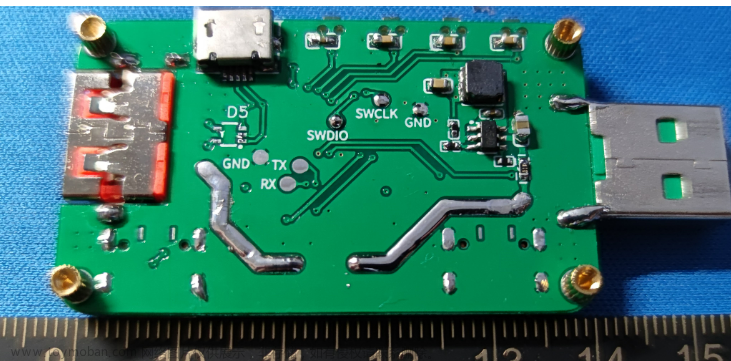
1.硬件电路
主要集成TTL转USB驱动,插入MicroUSB线即可使用。
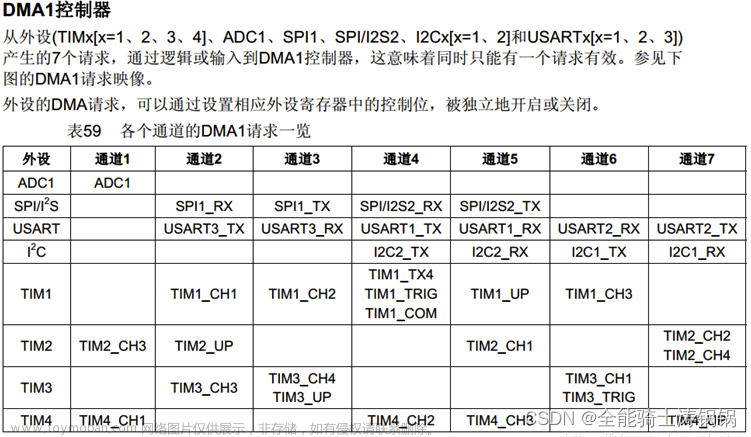
2.串口讲解
2.1定义
UART是一种通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输和接收。
在单片机产品设计中,UART主要用于设备与设备之间的通讯,设备与传感器之间的通信。例如通过RS-485接口,构成工业设备系统总线。
2.2协议
UART作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输。
其中各位的意义如下:
起始位:先发出一个逻辑"0"的信号,表示传输字符的开始。
数据位:紧接着起始位之后。数据位的个数可以是4、5、6、7、8等,构成一个字符,从最低位开始传送。
奇偶校验位:数据位加上这一位后,使得"1"的位数应为偶数(偶校验)或奇数(奇校验),以此来校验资料传送的正确性。(一般这个位可以不设置,减少位数,提高传输数据量)
停止位:它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率同时也越慢。(一般设置为1位高电平)
空闲位:处于逻辑"1"状态,表示当前线路上没有资料传送。
波特率:衡量数据传送速率的指标。表示每秒钟传送的比特位。(不同使用场景设置不同波特率,对数据要求准确,较少传输速率)
图示如下:

3.软件编程
3.1参数配置
串口打印函数需要配置串口参数,我们需要配置cubemax相关参数,主要是串口的引脚,波特率,有效数据个数,停止位,采样次数,奇偶校验位,主要配置如下:

3.2程序结构
3.2.1程序框架
文章来源地址https://www.toymoban.com/news/detail-587646.html
整体框架没有发生变化,配置完串口之后,会自动生成串口源文件。且源文件中会自动生成我们配置好参数的代码:
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
}3.2.2打印配置
我们要实现串口显示状态机运行次数,首先我们需要在run函数部分增加打印函数,这样才可以通过串口发送到终端显示,代码如下:
文章来源:https://www.toymoban.com/news/detail-587646.html
static void Run()
{
static uint16_t STA_Cnt = 1;
if(STA_Machine.ucSTA_Machine_Status == STA1)
{
printf("״̬»úµÚ%d´ÎÔËÐÐ!\r\n",STA_Cnt++);
}
//ÔËÐÐ״̬»ú
switch(STA_Machine.ucSTA_Machine_Status)
{
case STA1: STA_Machine.Fun_STA1(); printf("״̬»ú״̬ΪSTA1\r\n"); break;
case STA2: STA_Machine.Fun_STA2(); printf("״̬»ú״̬ΪSTA2\r\n"); break;
case STA3: STA_Machine.Fun_STA3(); printf("״̬»ú״̬ΪSTA3\r\n"); break;
case STA4: STA_Machine.Fun_STA4(); printf("״̬»ú״̬ΪSTA4\r\n"); break;
case STA5: STA_Machine.Fun_STA5(); printf("״̬»ú״̬ΪSTA5\r\n\r\n"); break;
default: STA_Machine.ucSTA_Machine_Status = STA1;
}
}为了方便清晰观察,我们可以在初始化部分,将版本号,测试说明放进去,具体代码如下:
static void Peripheral_Set(void);
/* Public variables-----------------------------------------------------------*/
MyInit_t MyInit =
{
Peripheral_Set
};
/* Private function prototypes------------------------------------------------*/
/*
* @name Peripheral_Set
* @brief ÍâÉèÉèÖÃ
* @param None
* @retval None
*/
static void Peripheral_Set()
{
printf("----´Ë³ÌÐòʵÏÖ´®¿Ú´òÓ¡¹¦ÄÜ----\r\n");
printf("Initialization completed, system startup!\r\n");
printf("Software version is V%.1f\r\n\r\n",SoftWare_Version);
printf("¿ªÊ¼ÔËÐÐÓÐÏÞ״̬»ú:\r\n\r\n");
}3.2.3串口发送配置
我们想使用串口发送函数,就要明白这个函数如何使用,以及传参的设置,该函数具体如下:
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)huart为串口号,pData是发送数据地址 需要注意的是 类型是八位的,Timeout是发送时限,超出这个时间,就是超时,需要重传。我们可以利用fput函数进行发送,具体代码如下:
int fputc(int ch,FILE* f)
{
//查询方式循环发送
HAL_UART_Transmit(&huart_debug, (uint8_t *)&ch, 1, 0x000A);
return ch;
}
4.效果展示
到了这里,关于STM32实战项目-串口打印的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!