详细介绍:OpenMV扫码识别;OpenMV串口通讯详解;OpenMV的单颜色识别讲解;MSP430F5529库函数学习——串口
目录
接线
OpenMV代码
代码
for...in...部分简单介绍
stm32代码
msp430f5529代码
个人一开始以为我写了的这几个博客已经够清楚了,让各大网友正常使用OpenMV图像处理,然后与单片机通讯应该会很简单。但还是有人不知道,我就还是提供一下我的代码。
代码就是识别红黄绿三种颜色和二维码信息,识别到颜色分别发送0、1、2。
接线
接线很简单,就是OpenMV的TX(P4)——单片机RX,RX(P5)——单片机TX,GND——GND,3.3V——3.3V
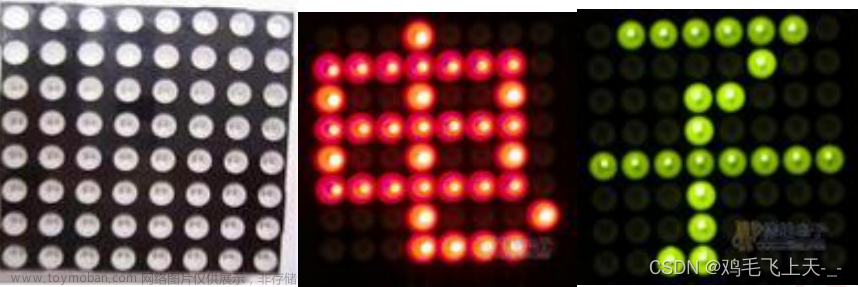
要识别的材料
gitee链接:gitee仓库

OpenMV代码
代码
由于我以上博客已经详细介绍了,再次不在啰嗦,直接贴代码。
import sensor, image, time, math
from pyb import UART
#threshold_index = 0 # 0 for red, 1 for green, 2 for blue
# 颜色跟踪阈值 (L Min, L Max, A Min, A Max, B Min, B Max)
# 下面的阈值通常跟踪红色/绿色/蓝色的东西。您可能希望调整它们……
thresholds = [(50, 65, 40, 50, 35, 60), # generic_red_thresholds
(75, 90, -80, -70, 40, 80), # generic_green_thresholds
(55, 70, -21, 0, -50, -35)] # generic_blue_thresholds
sensor.reset()#重置感光元件,重置摄像机
sensor.set_pixformat(sensor.RGB565) #设置颜色格式为RGB565,彩色,每个像素16bit。
sensor.set_framesize(sensor.QVGA) #图像大小为QVGA
sensor.skip_frames(time = 2000) #跳过n张照片,在更改设置后,跳过一些帧,等待感光元件变稳定。
sensor.set_auto_gain(False) #颜色识别必须关闭自动增益,会影响颜色识别效果
sensor.set_auto_whitebal(False) #颜色识别必须关闭白平衡,会影响颜色识别效果,导致颜色的阈值发生改变
clock = time.clock()
uart = UART(3, 9600) #初始化串口3,波特率为9600(注意:上位机记得也配置成9600)
# 只有像素大于“pixels_threshold”和面积大于“area_threshold”的区域才是
# 由下面的"find_blobs"返回。更改“pixels_threshold”和“area_threshold”
# 相机的分辨率。"merge=True"合并图像中所有重叠的斑点。
while(True):
clock.tick()# 追踪两个snapshots()之间经过的毫秒数.
img = sensor.snapshot()#截取感光元件中的一张图片
img.lens_corr(1.8) # 1.8的强度参数对于2.8mm镜头来说是不错的。
#在img.find_blobs这个函数中,我们进行颜色识别
#roi是“感兴趣区”,是在画面的中央还是右上方或者哪里进行颜色识别。此处我们没有进行配置,默认整个图像进行识别
for blob in img.find_blobs([thresholds[0]], pixels_threshold=200, area_threshold=200, merge=True):
# 这些值始终是稳定的。
uart.write("0")
print('0')
img.draw_rectangle(blob.rect()) #用矩形标记出目标颜色区域
img.draw_cross(blob.cx(), blob.cy()) #在目标颜色区域的中心画十字形标记
for blob in img.find_blobs([thresholds[1]], pixels_threshold=200, area_threshold=200, merge=True):
# 这些值始终是稳定的。
uart.write("1")
print('1')
img.draw_rectangle(blob.rect()) #用矩形标记出目标颜色区域
img.draw_cross(blob.cx(), blob.cy()) #在目标颜色区域的中心画十字形标记
for blob in img.find_blobs([thresholds[2]], pixels_threshold=200, area_threshold=200, merge=True):
# 这些值始终是稳定的。
uart.write("2")
print('2')
img.draw_rectangle(blob.rect()) #用矩形标记出目标颜色区域
img.draw_cross(blob.cx(), blob.cy()) #在目标颜色区域的中心画十字形标记
for code in img.find_qrcodes(): # 进行二维码检测
img.draw_rectangle(code.rect(), color = (255, 0, 0))
message = code.payload() #返回二维码有效载荷的字符串
if message == 'red':
uart.write("0")
print('0')
if message == 'green':
uart.write("1")
print('1')
if message == 'blue':
uart.write("2")
print('2')
for...in...部分简单介绍
可能有人看到,我这里是使用了 for...in...,那么程序应该无论如何都会依次发送0、1、2。其实不是这样的,你可以写一个这个。你会发现,如果OpenMV没有识别到红色,那么串行中断显示的都是【】,这个表示一个空数组。而因为他是空数组,所以没有数据返回给blob,for...in...语句也就不会进行,因此不会依次发送0、1、2。
print(img.find_blobs([thresholds[0]], pixels_threshold=200, area_threshold=200, merge=True))stm32代码
我只贴串口2中断部分,如果你连stm32串口配置都不会,那我也无话可说。
注意,我这里Task_OLED_ShowString是我自己写的OLED函数,你是没有的。虽然这是很基础的东西,还是提醒一下。
//OpenMV串口中断
void USART2_IRQHandler()
{
uint16_t temp;
//while(USART_GetITStatus(USART1,USART_IT_RXNE) == RESET); //使用这个,程序会一直停留在这里
if(USART_GetITStatus(OpenMV_USART,USART_IT_RXNE) != RESET)
{
temp = USART_ReceiveData(OpenMV_USART);
switch(temp)
{
case '0':Task_OLED_Clear();Task_OLED_ShowString(0,0,"Red",40);break;
case '1':Task_OLED_Clear();Task_OLED_ShowString(0,0,"Green",40);break;
case '2':Task_OLED_Clear();Task_OLED_ShowString(0,0,"Blue",40);break;
}
}
//USART_SendByte(OpenMV_USART,temp);//将接收到的数据返回
//USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}msp430f5529代码
这里是用的串口0 文章来源:https://www.toymoban.com/news/detail-589080.html
MSP430F5529库函数学习——串口文章来源地址https://www.toymoban.com/news/detail-589080.html
#pragma vector=USCI_A0_VECTOR
__interrupt void USCI_A0_ISR (void)
{
uint8_t receivedData = 0;
switch (__even_in_range(UCA0IV,4))
{
//Vector 2 - RXIFG
case 2:
receivedData = USCI_A_UART_receiveData(USCI_A0_BASE);
switch(receivedData)
{
case '0':Task_OLED_Clear();Task_OLED_ShowString(0,0,"Red",40);break;
case '1':Task_OLED_Clear();Task_OLED_ShowString(0,0,"Green",40);break;
case '2':Task_OLED_Clear();Task_OLED_ShowString(0,0,"Blue",40);break;
}
break;
default:
break;
}
}到了这里,关于OpenMV图像处理之后给单片机通讯的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!