无人机在研制过程中需要不断地进行飞行测试,而测试的过程不是万无一失的,飞行过程中发生任何错误都有可能会导致无人机的损毁或破坏,更严重地甚至会造成外界伤害。
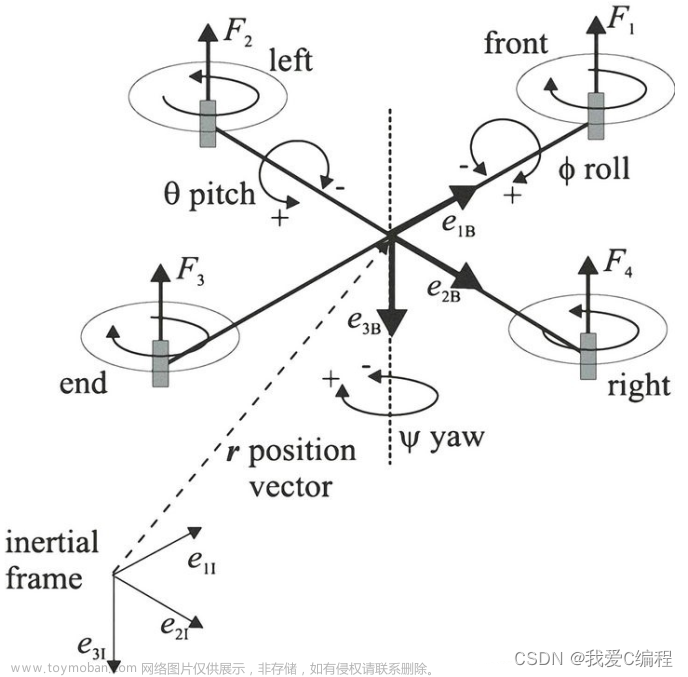
基于此我们推出了无人机的三旋转自由度 (3-DOF) 飞行平台测试系统,可以在横滚 (Roll)、俯仰 (Pitch)和偏航 (Yaw) 三个轴上自由转动,帮助您高效安全的进行无人机飞行动态测试,尤其适合垂直起降无人机 (eVTOL) 的测试。
FFT GYRO 是一款设计专用于测量无人机的三旋转自由度 (3-DOF) 飞行平台测试系统,可以支持各种类型的多旋翼无人机以安全有效的方式进行首次飞行测试。特有的安全结构允许无人机在开放或封闭的空间中轻松实现人机互动。无论您的公司是专注于无人机的销售、客户体验还是研发,这个有用的工具都将为您的项目提供极大的帮助。

产品用途
- 无人机飞行教学 & 飞手培训
- 研制开发过程中的自由飞行动态测试
- 无人机应用技术的集成定制测试
- 试飞前机载传感器校准 &PID 飞控调试
- 全新概念无人机机械结构、电子化设计和飞控算法的开发和研制
- 外部环境仿真测试(如:模拟风和湍流等)
- 固定翼无人机机型自由飞行仿真测试
测试台操作软件
FFT GYRO 测试台与 PC 的通信是通过串口 (USB) 端口连接的,固件驱动程序也是通用的 USB 类型,因此用户可以使用任意一台计算机即可以轻松实现连接。我们同时开发了一款与 FFT GYRO 测试台基于图形界面的人机交互软件,软件兼容 Windows、OS 和 Linux 操作系统,同时通信协议设计的简洁易用,用户可以轻松掌握即可用于产品测试:文章来源:https://www.toymoban.com/news/detail-589265.html
 文章来源地址https://www.toymoban.com/news/detail-589265.html
文章来源地址https://www.toymoban.com/news/detail-589265.html
到了这里,关于无人机飞行控制实验平台的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!