机器视觉海康visionmaster-字符快速识别,字符缺陷检测
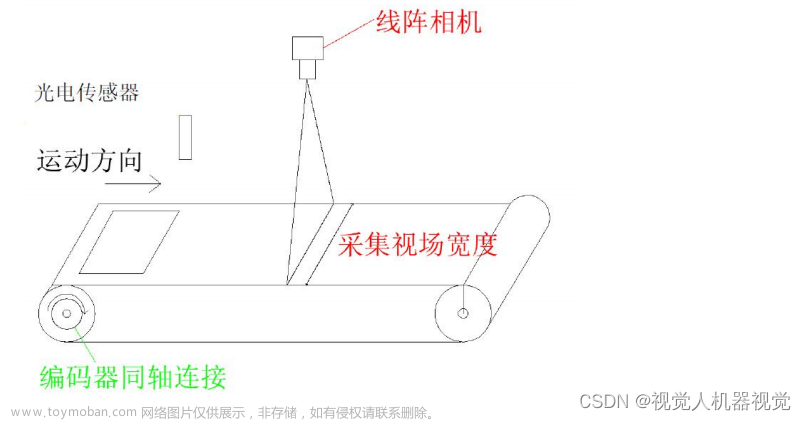
为什么要对线阵相机进行平场矫正(PRNUC)
线阵相机需要平场矫正(PRNUC)主要是因为获取得图像有异常,如图像边缘亮度与中心亮度不一致情况等,
对于现场使用相机获取图像数据有较大影响,故而需要对线阵相机进行平场矫正操作一板情况下有以下原因需
要平场矫正:
(1) 光照不均
(2) 镜头中心和镜头边缘响应度不一致
(3) 成像元器件得各像元响应不一致9
(4) 固定的图像背景噪声
一般情况下异常图像如下图所示:
平场矫正(PRNUC)实现步骤
2.1 平场矫正(PRNUC)前需确认
(1) 视野中需要是一张平整无折痕的白纸,且白纸铺满整个相机视野
(2) 相机端图像灰度值需要保持在 120~160 之间,且最亮像素点的灰度值与最暗像素点的灰度值差不能超过 4 倍。(查看像素点灰度值,可以将鼠标移动到图像中的某一个像素点上,在 mil 软件中可以停止取流查看到 R、G、B 三通道值,在 MVS 中无需停流即可查看到 R、G、B 三通道值,如下所示)
(3) 需要将相机端获取图像尽量模糊化(整体图像都模糊,减少白纸对平场矫正的影响),
将镜头进行虚焦,虚焦之后整体图像模糊化;
使用 PRNUC 中的低通滤波功能,将该功能开启后,图像会变的比较模糊,效果与虚焦镜头相同
2.2 平场矫正(PRNUC)操作方法
在以上的设置以及注意事项等均进行设置好后,进行平场矫正(PRNUC),此时操作只需要对相机端参数进行
操作;
(1) Shading Selector 选择 PRNUC Correction(如图中标号 1 )
(2) Activate Shading 点击 Execute(步骤 2 等待 2-3s 后执行步骤 3)(如图中标号 2 )
(3) PRNUC Enable 勾选使能 (如图中标号 3)
矫正前后图像对比如下: 文章来源:https://www.toymoban.com/news/detail-591942.html
文章来源:https://www.toymoban.com/news/detail-591942.html
视觉人机器视觉培训-视觉引导定位项目文章来源地址https://www.toymoban.com/news/detail-591942.html
到了这里,关于海康线扫相机平场校正/阴影校正教程的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!