反步法设计:
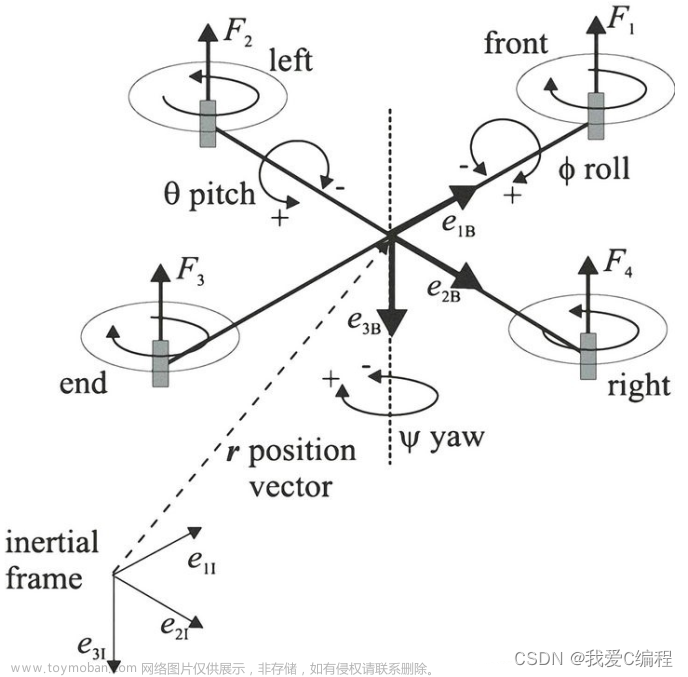
1.建立四旋翼无人机非线性模型:

2.位置环虚拟控制律及反步控制器设计:

3. 姿态解算

4.姿态环虚拟控制律及反步控制器设计:

5.搭建simulink,仿真结果如下:






 文章来源:https://www.toymoban.com/news/detail-592368.html
文章来源:https://www.toymoban.com/news/detail-592368.html
 文章来源地址https://www.toymoban.com/news/detail-592368.html
文章来源地址https://www.toymoban.com/news/detail-592368.html
到了这里,关于四旋翼无人机反步法控制器设计(含simulink仿真)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!