Swarm intelligence algorithms for multiple unmanned aerial vehicles collaboration: a comprehensive review
用于多种无人机协作的群体智能算法:综合综述
https://doi.org/10.1007/s10462-022-10281-7
Swarm intelligence algorithms for multiple unmanned aerial vehicles collaboration: a comprehensive review
摘要:
在过去的十年里,无人机(uav)显示出了越来越大的前景。在此背景下,我们提供了一个在多个无人机协作中发挥极其重要的作用。本研究集中在与该主题相关的四个方面:避免碰撞处理、任务分配、路径规划和地层重组。综合研究了选定的典型算法,分析了它们在多无人机协作中的优缺点。本研究总结了群智能算法的基本结构,其中包括几个基本阶段;并对多无人机协作的四个方面的群智能算法进行了全面的调查。此外,通过分析这些关键技术和相关应用,突出了研究趋势和挑战。这篇广泛的综述是为学者和专业人士在无人机群的概述。
一、多无人机协作中的群体智能
群智能算法本质上是基于迭代随机搜索算法,在迭代过程中全局共享启发式信息,进行后续迭代搜索。根据创造这些技术的灵感来源,它们基本上可以分为四类:进化现象、生物群体智能、物理规则和与人类相关的概念。
在众多的群智能算法中,可以抽象出一个基本框架。第一步是初始化操作,包括定义相关参数值,设置终止条件,随机生成agent。然后,根据初始设定的评价函数对群中的agent进行评价。然后,根据设定的唯一规则对智能进行评估,并对代理进行更新。最后判断是否满足终止条件,循环或结束迭代过程。
选择遗传算法(GA)和差分进化算法(DE)是基于进化现象的;选择粒子群算法(PSO)、蚁群算法(ACO)和人工蜂群算法(ABC)是基于生物的群体智能算法;引力搜索算法(GSA)基于物理规律;其他在这一领域使用较少的被归为其他。此外,基于人的概念的算法在无人机领域很少使用,也没有选取典型的此类算法。图2显示了自1950年以来,我们基于谷歌Scholar数据和Web of Science数据检索的多无人机协作领域的研究数量。结果表明,在过去的几十年里,群智能算法在这一领域进行了较为深入的研究和应用。
由于无人机(UAV)的应用环境日益复杂,所执行的任务日益多样化,以及单架无人机能力有限,对多架无人机协作技术的需求日益迫切,已成为日益重要的发展趋势。多年来,大量的研究通过分析自然界生物的群体行为,如模仿鸟类迁徙、蜜蜂觅食等,进一步解决了当前的问题,以最大限度地提高单架无人机的效率,并控制多架无人机的决策和管理。从而更安全、更可靠、更稳定地完成避碰、任务分配、路径规划、编队重构等任务。
群体智能算法在解决优化问题方面的卓越性能体现在简单的静态问题和复杂的动态问题。具有静态目标函数的算法在优化过程中通常保持之前给定的目标函数,而其他算法在搜索过程中目标函数会发生变化。影响群智能算法分类的因素有很多。核心是基于算法在每次迭代中生成的随机解的数量:基于单解的算法和基于种群的算法。前者在优化过程中只随机生成一个候选解,并不断迭代;后者会生成多个候选解,更有利于搜索空间信息的共享,具有更强的空间探索能力。
二、典型的群智能算法
这些描述性的群智能算法是非常高效的群优化算法,它们已经在大量的学术和现实问题上得到了验证。它们向解收敛速度较慢,且在一定程度上搜索时容易出现停滞,因此存在缺陷。因此,在结合具体应用时,对基本的群智能算法进行了相应的改进,以避免此类问题的出现。在这个小节中,我们讨论并代表了不同类型的多无人机协作群智能算法。
1.遗传算法
基于自然界生物遗传学和种群进化规律和过程的启发式算法是一种进化算法(GA)。根据演化算法的发展历史,演化算法主要有四个分支。最流行的是由Holland为模拟达尔文进化论而开发的遗传算法(Holland 1992)。该算法是在研究生物遗传现象和人工适应系统行为之间的相似之处时创建的。该算法从随机初始种群开始;主要采用随机选择、交叉、变异等操作,获得一组对环境适应性更强的新个体;并最终逐代收敛到最优个体,生成问题的最优解(Chen and Liu 2007)。
在评估个体的适应度后,使用选择算子来确定如何从亲本群体中选择个体作为后代。常用的方法有轮盘赌轮盘选择、随机锦标赛、例外值选择等(Katoch et al. 2021)。通过交叉算子,遗传算法能够保持种群的原始特征,即能够模仿自然界有性繁殖的基因重组过程。最后一个操作是变异操作。突变操作以一定的概率选择一定的位或几个个体,随机改变这些位的基因值。
2.差分进化
差分进化(DE)是由Rainer Storn和Kenneth Price在1995年共同提出,用来求解Chebyshev多项式(Storn and Price 1997)。本质上,它是一种基于种群的随机搜索算法。与遗传算法类似,它主要通过突变、交叉和选择三种操作算子模拟生物进化过程,使初始解演化为全局最优解(Wang et al. 2011)。在过去几十年的发展过程中,DE越来越受到研究者的关注,并成功地应用于各个科学和工程领域。
差分进化中的选择和交叉操作与前面介绍的遗传算法相似,其中最重要的操作是变异操作。
本质上,DE算法的变异过程是将父向量中不同个体的加权差分向量加到基向量上,也可以说是对基向量进行了随机扰动。
3.粒子群优化算法
基于对鸟群行为的研究,Kennedy和Eberhart在1995年提出了PSO算法(Kennedy and Eberhart 1995)。在该算法中,一组粒子通过不断与相邻粒子的信息相互作用来更新自己的速度和位置,从而找到全局最优值。算法的初始状态是由随机粒子组成的解群,每个粒子只有两个属性:速度和位置。粒子根据当前个体最优值和当前全局最优解不断调整自己的速度和位置。
更新过程:
4.蚁群优化
蚁群优化算法最早由Marco Dorigo在1992年的博士研究的基础上提出(Dorigo 1992)。它的核心思想是学习蚂蚁在寻找食物或躲避危险时寻找路径的行为。蚁群算法具有分布式、正反馈和启发式搜索的特点(Dorigo 1992)。具体来说,它模仿了蚂蚁对信息素的处理过程。蚂蚁可以在行进途中留下一种叫做信息素的物质,其他蚂蚁可以感知到这种物质的强度,从而在觅食过程中指导它们的行动方向。首先,m蚂蚁随机出发,它们的信息素浓度初始值都是相等的。然后,蚂蚁根据随机比率规则选择下一个要转移的位置,其选择概率为(Dorigo and Caro 1999):
一段时间后,所有的蚂蚁完成了一个动作。然后,计算每个蚂蚁的路径长度;最短路径长度,也就是当代最优解,被节约了。考虑到信息素的挥发和边缘蚂蚁对信息素的释放,对信息素数据进行更新,以备下一次迭代。
5.人工蜂群
受蜂群智能觅食行为的启发,Karaboga在2005年开发了ABC算法来处理多元优化问题(Karaboga 2005)。蜜蜂群体可以通过相互合作有效地从食物来源采集花蜜。最初的ABC算法包括三种类型的蜜蜂:雇佣蜜蜂、旁观者蜜蜂和侦察蜜蜂。每种蜜蜂都有自己的劳动分工。更正式地说,被雇佣的蜜蜂会在原始食物来源xm附近寻找更丰富的食物来源dm (Tsai et al. 2009)。之前的研究将待挖掘食物的适合度与原始适合度进行了比较,通过以下过程发现了新的食物来源(Kaur and Goyal 2011):
其中,可以将每个食物源视为待优化问题的求解向量。蜜蜂采用贪婪选择,并根据适合度值来决定挖掘哪个食物源。适应度可以根据。式中,fm()为该优化问题的目标函数。
6.引力搜索算法
引力搜索算法是由Esmat Rashedi, Hossein Nezamabadipour等人在2009年创建的。该算法将每个agent视为问题的解,并以质量来衡量解的性能。所有这些物质都会被引力吸引或排斥。通过这种直接的交流形式,经过一定次数的迭代后,他们会倾向于转向更高质量的agent,即更好的agent (Rashedi et al. 2009):
式中,G(t)为t时刻的引力常数,(xd j−xd i)为两个个体之间的质量差,Rij(t)为i与j之间的欧氏距离,Fijd(t)为个体之间的引力作用。另外,将agent的下一次速度视为其当前速度加加速度的一小部分。因此,其位置和速度可计算为(Rashedi et al. 2009):
说明vd I (t + 1)的更新需要AD I (t)的加速。根据牛顿第二定律,将结合得到的力Fd i (t)除以agent的质量Mi即可得到加速度。
7.其他
除了上述在多无人机协作中的应用外,还有许多其他的群体智能优化算法。例如,还有两个基于进化思想的分支:进化策略(ES)以及进化编程(EP) (Fogel 1998)。基于生物群体行为的麻雀搜索算法基于麻雀的觅食行为和反捕食行为(Xue and Shen 2020),受启发的蝙蝠算法(IBA)受微蝠回声定位的影响(Yang 2010),灰狼优化器(GWO)受狼的组成和等级的影响(Mirjalili et al. 2014),鲸鱼优化算法(WOA)模拟了座头鲸群体的行为(Mirjalili和Lewis 2016)。其他算法则基于物理规则。模拟退火算法(SAA)基于退火过程(Kirkpatrick et al. 1983),正弦余弦算法(SCA)受正弦和余弦函数的影响(Abualigah和Diabat 2021),人工电场算法(AEFA)受库仑静电力定律(Yadav 2019b)的启发。
这些群体智能算法的灵感仍然主要来自于自然界的生物群体,特别是昆虫和动物,通过人为设计信息交换机制,模拟生物群落中个体之间的信息交换过程,从而利用有向迭代优化问题(Zhang et al. 2007)。近年来提出的大多数新的群智能算法都是对传统算法的改进,主要侧重于优化参数、提高速度和融合已知算法(Yang et al. 2018)。
三、任务分配中的群智能算法
为提高任务执行效率,多架无人机一般采用团队协作的方式。无人机配备了具有互补功能的不同传感器,以适应复杂的任务约束。在任务数量较多的情况下,任务分配的优化效果直接影响到多无人机系统的工作效率。
1.任务分配
多无人机任务分配问题具有高度非线性、动态性、高度对抗性和多模态等固有的复杂性。该问题的目标是在实现多种指标的前提下,实现不同属性目标所产生的总奖励最大化,实现无人机编队整体效能最大化。将任务分配给多个无人机时,根据无人机的类型和特点分配相应的任务。图4显示了多架无人机执行侦察和打击任务的任务分配场景。如图4a所示,部署三架侦察无人机UAV1、UAV2、UAV3执行侦察任务,分别负责三个任务子区域TaskArea1、TaskArea2、TaskArea3。经侦察得知,任务区内有五个关键打击目标{T1, T2, T3, T4, T5}。如图4b所示,算法评估后,分配UAV4打击T1、T2目标,分配UAV5打击T3目标,分配UAV6打击T4、T5目标。然而,在大多数情况下,背景更为复杂,例如,(Stolfi et al. 2021)提出了一种捕食者-猎物方法来保护一个限制区域免受大量入侵者的侵袭,并利用共同进化的遗传算法来优化无人机参数,以最大化入侵者检测。
2.代表性应用
本文总结并分析了表3中用于多无人机任务分配问题的典型群智能算法。在此表的类型中,使用“UAV类别”来表示研究对象是固定翼还是旋转翼无人机,使用“Cooperative allocation”来区分无人机实体在任务分配过程中是否合作,使用“UAV formation”来表示无人机是均匀的还是异构的,使用“Number of targets”来确定任务分配算法是针对单个目标还是多个目标,“目标要求”用于表示对目标是否有优先级或时间窗要求,“不确定性”用于表示算法是否考虑相关的不确定因素,“空间维度”用于说明算法的功能空域,“算法”表示应用的算法,“年”表示发布的年份。
对于二维空间的任务分配问题,为了根据相对距离将每架无人机分配到每个火点,Ghamry等(2017)利用粒子群算法和控制参数化和时间离散化(CPTD)方法,在考虑控制输入约束的情况下,计算出森林消防中多架无人机的最优任务分配。Schwarzrock等人(2018)以分散的方式开发了一种从Swarm-GAP(广义分配问题)算法到多架无人机任务分配的解决方案。它假定任务是由一个中央实体产生的,例如在监测一个地区以探测不同目标为目标的军事行动期间。考虑到敌对环境中优化问题的计算时间和非凸性,Kim等人(2021)提出了社会学习粒子群算法(social-learning PSO),以最大限度地将估计舰船整体损伤的目标函数作为交战结果。Wu等(2018)在完整分析经典蚁群分工的基础上,提出了一种动态蚁群分工及实现方法,用于处理无人机群体战斗中动态环境下的任务分配问题,结果表明该方法在各种多智能体系统中具有较好的实用性。Zhang等(2016)针对异构无人机在协作团队中作业时的分配问题,开发了一种混合GSA-GA,该GA采用遗传算法中的选择、交叉和变异操作来实现GSA粒子的位置更新策略,实验表明其性能有所改善。Amorim等(2020)将群智能思想与广义分配问题(GAP)方法相结合,开发了一种启发式方法,即swarm-GAP,用于解决表示多架无人机的智能体之间的任务分配问题,优化动态环境中的资源使用。
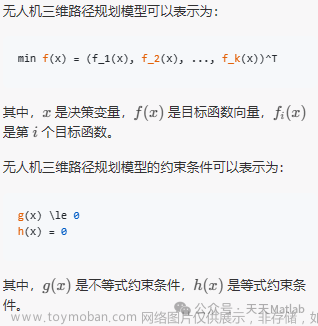
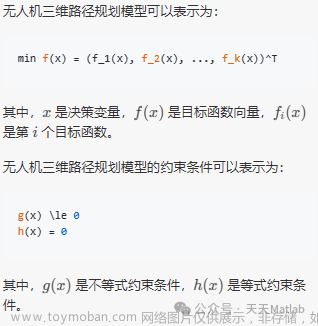
针对三维空间任务分配问题,
- 为了解决压制敌方防空任务对多个地面静止目标的问题,Ye等(2020)开发了一种具有多类型基因染色体编码策略的改进遗传算法,用于对多目标无优先级或时间窗要求的异构固定翼无人机协同任务分配问题。
- Xu等(2020)研究了多目标混排蛙跳算法(MOSFLA)和基于遗传算法(GA)的多旋翼无人机植防作业优化任务分配与排序模型,结果表明,使用具有已知分配矩阵的遗传算法将大大缩短总作业时间。
- 考虑到资源消耗、任务完成效果和工作量平衡,Han等(2021)采用了提出的具有良好计算效率的模糊精英策略遗传算法(FESGA来解决资源受限和任务优先级约束的异构无人机系统的任务分配问题。
- Zhao等(Ming et al. 2017)通过生成合理的DE后代,提出了一种具有统一基因编码策略的离散映射DE算法,不仅有效地解决了协同多目标分配问题,而且提高了多目标分配的精度和规模。
- Yang等(2020)以平衡全局负载和最小化减速为目标,引入了DE算法来探索无人机在地面物联网网络中的接近最优位置,仿真结果显示了该方法的可行性和优越性。
- Liu等(2019a)在任务分配仿真中对标准蚁群算法、多激励蚁群算法和人工势场蚁群算法进行了比较,结果表明,两种增强算法使用的增强策略能有效加快蚂蚁路径搜索速度,从而减少无人机航迹规划时间。
- 为了优化不同场景下空中基站的三维位置,Hu等(2020)提出了一种*改进的基于智能搜索和特殊划分的ABC (ABCIS)**来提高性能,结果表明该方法在单模态和多模态函数上都能获得显著增强。
- Lu等人(2020)利用粒子群算法(PSO)和遗传算法(GA)改进了GWO在高维任务分配中的应用,以加快收敛速度,并通过三种地面攻击场景的仿真验证了所开发的方法。
- Dong等人(2020)引入了一种顺序蒙特卡罗(SMC)方法重采样机制,以提高标准狮子群优化(LSO)的性能;结果表明,该方法能有效地避免过度集中,扩大搜索范围,提高搜索能力。
- 以同时减少任务完成时间和总任务时间为规范,Luo等(2020)开发了一种具有双方法切换的多群果蝇优化算法(MFOA),用于处理多功能异构无人机协同任务分配问题。
四、趋势与挑战
各种无人机由于具有较强的风险承受能力、较低的制造成本和良好的机动性,在军事和民用领域得到了广泛的应用。在相关挑战中,多无人机的避碰、任务分配、路径规划和编队重构是不同无人机自主控制的核心科学问题(Tang et al. 2021c;Pan等人,2021年)。针对多无人机协同的主要方向,给予足够的重视和努力,可以全面完成任务。本部分强调了该领域未来的研究方向。
1.转变信息交换方式
在控制无人机集群飞行时,通常假设信息能够连续接收,但这需要足够的计算资源和理想的通信环境。但在实际飞行过程中,会遇到传输速度受限、传感器信息获取延迟等问题。因此,如何更好地利用群智能算法,进一步改变无人机之间、系统与无人机之间的信息传递和交互方式,成为亟待解决的关键问题之一。要实现这一转化,需要在保证信息质量、不受干扰、提高控制性能的同时,显著减少通信和计算资源的过度消耗,从而设计出更合适的群体智能程序。
2.控件使用分布式方法
分布式控制在多任务协调中发挥了重要作用,成为无人机集群协调技术的核心之一。然而,这种分布式控制策略可以进一步整合群智能算法,开发出更先进的控制方案。简单地说,该融合技术可以应用于自主编队、态势感知、全局规划等多种功能,以更好地建模集群中单个无人机的个体行为和无人机系统的整体行为。我们熟悉集中控制。虽然集中控制更有效,但一旦中心无人机损坏,整个无人机集群将崩溃。而如果采用分布式群智能控制方法,则可以有效降低整个系统的成本,进一步提高系统的鲁棒性和灵活性。
3.开发移植方便
为了适应更复杂的应用场景,往往需要不同类型、不同系统功能的无人机对新技术进行有效集成和全面集成。这也是无人机协同研究和发展的重要趋势之一。为了实现这一目标,有必要借鉴群体智能行为的启发,大力开发一种针对不同类型无人机的更加开放的系统架构。也为组件和平台提供统一的标准和工具,进行相互交换或全面集成,使不同类型或平台的无人机集群也可以快速升级或替换。异构无人机集群是由多个平台上部署不同功能模块的无人机组成,平台和功能更加多样化和集成化。分布式是指将无人机集群的整体功能分解为多个同质或异构的子功能,通过信息交互、通信和协作,将这些子功能同时分布在不同的单架无人机上,达到均衡性或更强的综合性能。不同平台上的无人机类型和性能往往差异很大,导致其运动和有效载荷特性存在差异,因此适用于不同的群体智能算法。单一的群智能算法无法满足异构无人机集群的需求,多群智能算法的综合集成将是一种可行的解决方案。该集成算法可应用于异构无人机群中各无人机的运动模式和通信模式的选择。在此过程中,需要根据系统架构设计多种群体智能算法的集成方法,使异构无人机群体能够以多种方式进行信息交换和协作。集成群智能算法的性能受到系统结构的限制。因此,异构分布式群智能算法的实现需要一种更加开放的系统架构,支持方便的移植和开发。
4.人机协作模式
在执行多个领域的各种任务时,有时需要人与机器之间的密切合作。人机协作是进一步提高无人机协同能力的关键技术。一般来说,当无人机被组织成集群时,它们可以与有人驾驶的飞机编队一起执行空中拦截和地面打击等任务。这种编排方式强调了无人机和有人驾驶飞机之间的密切配合、综合集成、系统保障和优势互补,从而提高了编队的整体效能。人机编组对无人机的自主能力提出了更高的要求。针对不同的任务场景,设计了层次群智能算法来匹配无人机所需的自主能力。在这些能力中,有必要进一步减少人工对无人机的干预,有必要利用群体智能算法做出更高层次的群体智能决策,提高整体编队反应速度。
5.加强自组织水平
自组织是指系统中各组成部分按照彼此一致的规则自动协调,形成相对稳定结构的过程。可以说,无人机协作是自组织水平的重要体现。除了它自己的状态,一个单独的无人机在做决定时必须考虑其他智能个体的行为。由于信息、网络、平台等技术的支持,集群可以实现信息共享;因此,这种考虑可以是一个更广泛的全球考虑,以便集群中的单个无人机可以实现共同的目标。行为选择更加精确和优化。未来,如果无人机集群在应用中更具协同性,那么在无人机系统的自组织模式下,群智能算法有必要将局部视角转变为全局视角。此外,在观察、判断、决策和行动过程中,群智能算法应以全局信息为核心,从全局角度进行综合权衡和全局控制。文章来源:https://www.toymoban.com/news/detail-594640.html
总结
随着无人机技术的快速高水平发展,将多架无人机作为自主控制的编队应用于复杂情况是一个新兴领域的代表之一。在实现自主控制的挑战中,碰撞避免、任务分配、路径规划和编队重构是关键功能。本文对各种经典的无人机群智能算法进行了系统的总结和分析。
搜索使用公认的科学数据库,如Web of Science、Elsevier、IEEE Xplore、Science Direct、SpringerLink、Scopus和谷歌Scholar,使用“遗传算法”和“碰撞避免”/“任务分配”/“路径规划”/“formation reconfiguration”等术语。差分进化算法采用相同的搜索格式代替遗传算法,其他群智能算法也采用相同的搜索格式。检索的文献包括期刊文章、会议论文、书籍章节和技术报告。一般来说,大多数的群智能算法都用于多无人机协作,本文对常用的算法和具有代表性的算法进行了讨论。本文提出了群智能算法的基本框架,划分了几个基本阶段,并给出了不同类型的多无人机协同群智能算法。利用提出的群智能框架,讨论和总结了冲突避免、任务分配、路径规划和编队重构的不同方法、技术、方法、设置和应用含义。此外,本文还对未来的研究方向提出了建议。希望本文能为研究人员和相关从业者提供信息和启示,为推动无人机应用产业的发展做出贡献。文章来源地址https://www.toymoban.com/news/detail-594640.html
到了这里,关于用于多种无人机协作的群体智能算法:综合综述的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!