






文章来源地址https://www.toymoban.com/news/detail-598147.html文章来源:https://www.toymoban.com/news/detail-598147.html
到了这里,关于小孔相机模型:世界坐标投影到2D平面的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
这篇具有很好参考价值的文章主要介绍了小孔相机模型:世界坐标投影到2D平面。希望对大家有所帮助。如果存在错误或未考虑完全的地方,请大家不吝赐教,您也可以点击"举报违法"按钮提交疑问。
文章来源地址https://www.toymoban.com/news/detail-598147.html文章来源:https://www.toymoban.com/news/detail-598147.html
到了这里,关于小孔相机模型:世界坐标投影到2D平面的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处: 如若内容造成侵权/违法违规/事实不符,请点击违法举报进行投诉反馈,一经查实,立即删除!
1.使用ScreenToWorldPoint将获取的屏幕位置直接转成世界坐标: 坑1:获取的屏幕坐标Input.mousePosition是一个2d坐标,z轴值为0,这个z值是相对于当前camera的,为零表示z轴与相机重合了,因此给ScreenToWorlfdPoint传值时,不能直接传Input.mousePosition,否则获取的世界坐标永远只有一个

相机坐标和世界坐标变换原理就是在4个坐标系直接转换, 如果考虑GIS系统那么还需要考虑空间参考坐标, 空间参考坐标系又需要考虑地理和投影坐标系, 加起来就是6个坐标系. 示例图如下 此段代码基于opencv, 畸变参数未考虑, 采用pnp求解内外参数,封装相机坐标和世界坐标

四个坐标系都是什么? 1.世界坐标系-相机坐标系-图像坐标系-像素坐标系 2.像素坐标系-图像坐标系-相机坐标系-世界坐标系 图像处理、立体视觉等等方向常常涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系 构建世界坐标系只是

之前只是停留在会用的阶段,一直没去读懂计算的原理,今天通读了大佬的文章,写的言简意赅,感谢感谢~~特此记录一下,仅用作个人笔记 贴链接,十分感谢~ https://blog.csdn.net/weixin_44278406/article/details/112986651 https://blog.csdn.net/guyuealian/article/details/104184551 将三维物体转换成照

一般情况下我们所涉及到的坐标包括四个,即相机坐标系、世界坐标系、图像物理坐标系、图像像素坐标系。我们本文的讲解思路是在讲解每个坐标转换之前先讲清楚每个坐标系所表示的含义。本文主要参考由高翔主编的视觉SLAM十四讲第五章相机模型。 相机将三维世界的坐
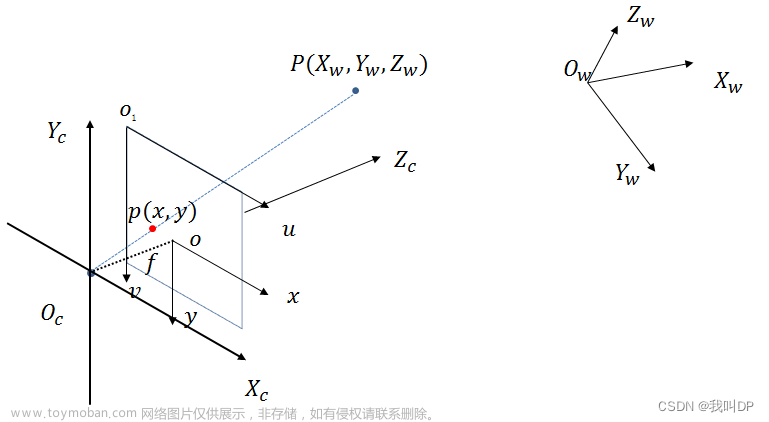
在项目中,研究标定时,像素坐标与轴位置的关系时,需要用到关于坐标系的转换。在此也就是找到世界坐标系与像素坐标系的转换关系。想理清楚故做如下记录。 四坐标关系图如下: 图中: 世界坐标系(O W —X W Y W Z W ): 一个三维直角坐标系,以其为基准可以描述相机

作者:木一 上文我们提到,三维相机是对 真实世界成像的模拟 ,为了让三维物体在计算机屏幕上呈现出来的图像符合人眼观察效果,通常采用 透视投影 方式模拟相机成像,为了简化计算,可以用 针孔相机模型 来描述 透视投影 成像过程。 针孔相机模型 是一种简化的光学

matlab 做相机标定后,想将第一张(任意一张都行)标定板角点所对应的像素坐标转换到世界坐标系下,标定板角点的像素坐标真值与世界坐标真值都非常容易获得,但是我通过内外参矩阵将像素坐标转换到世界坐标有很大的误差,如下 像素坐标到世界坐标之间的转换可参考

参考文献:视觉SLAM十四讲、视觉惯性SLAM理论与源码分析、该博客、文中的公式直接引用上面的文章,如有侵权请联系本人删除 投影过程 三维世界中的物体(目标点)P反射光线,通过相机光心,投影到相机的感光平面(物理成像平面/像素成像平面),一个个的光线投影点汇
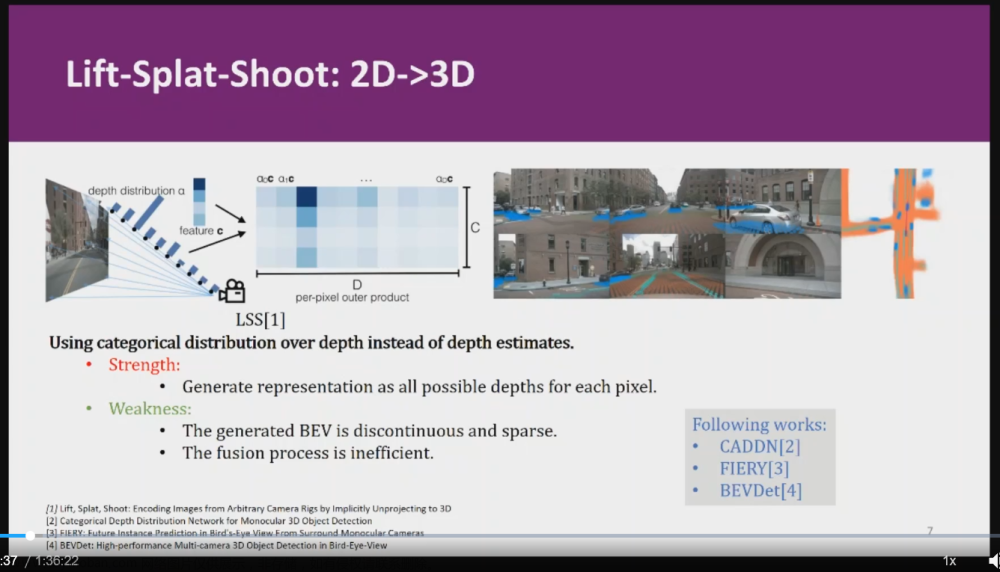
Lift-Splat-Shoot 很巧妙的利用 attention 的方式端到端地学了一个深度,但是因为没有显式的深度作为监督. 当前在BEV下进行感知方法大致分为两类,一类是以Transformer 为主体的隐式深度(Depth)信息进行转换的架构,另一类则是基于显示的深度估计投影到BEV下的方法,也就是本文



