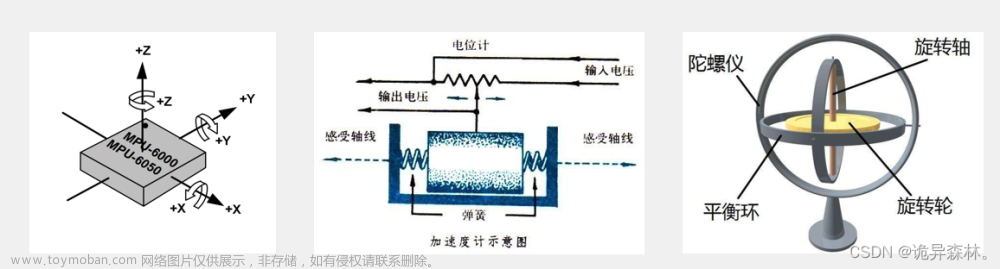
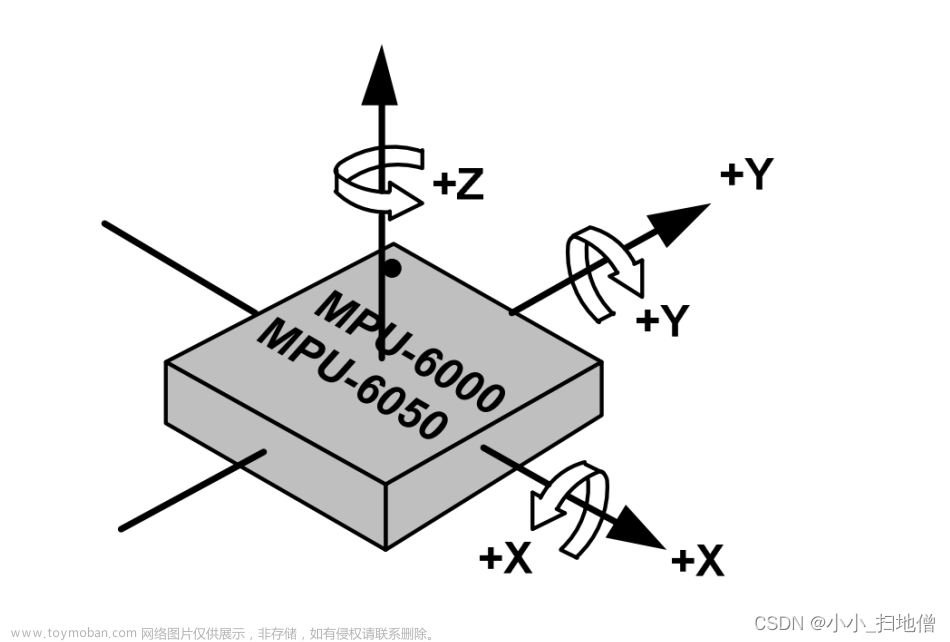
MPU6050简介
MPU-6000(6050)为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时间轴之差的问题,减少了大量的封装空间。当连接到三轴磁强计时,MPU-60X0提供完整的9轴运动融合输出到其主I2C或SPI端口(SPI仅在MPU-6000上可用)。
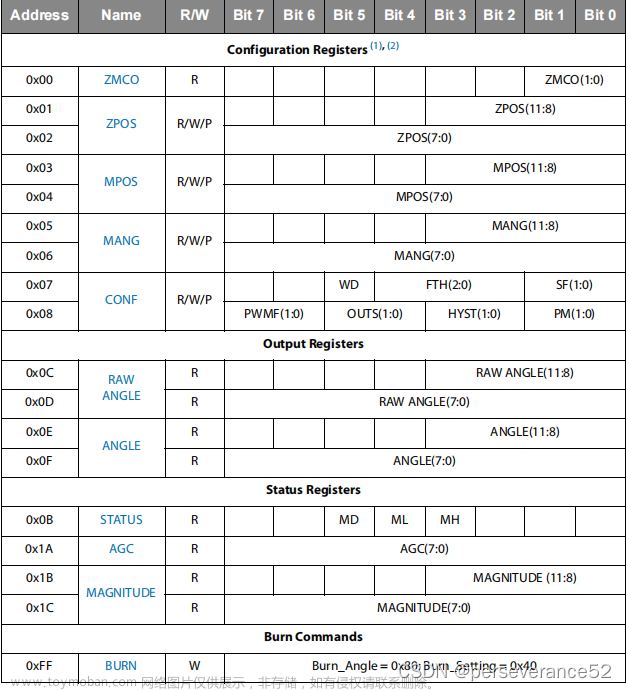
寄存器查询表格
| 寄存器地址 | 寄存器内容 |
|---|---|
| 0X3B | X轴加速度测量值高位 |
| 0X3C | X轴加速度测量值低位 |
| 0X3D | Y轴加速度测量值高位 |
| 0X3E | Y轴加速度测量值低位 |
| 0X3F | Z轴加速度测量值高位 |
| 0X40 | Z轴加速度测量值低位 |
| 0X41 | 温度测量值高位 |
| 0X42 | 温度测量值低位 |
| 0X43 | X轴角度测量值高位 |
| 0X34 | X轴角度测量值低位 |
| 0X45 | Y轴角度测量值高位 |
| 0X46 | Y轴角度测量值低位 |
| 0X47 | Z轴角度测量值高位 |
| 0X48 | Z轴角度测量值低位 |
| 0X6B | 电源管理,典型值:0x00(正常启用) |
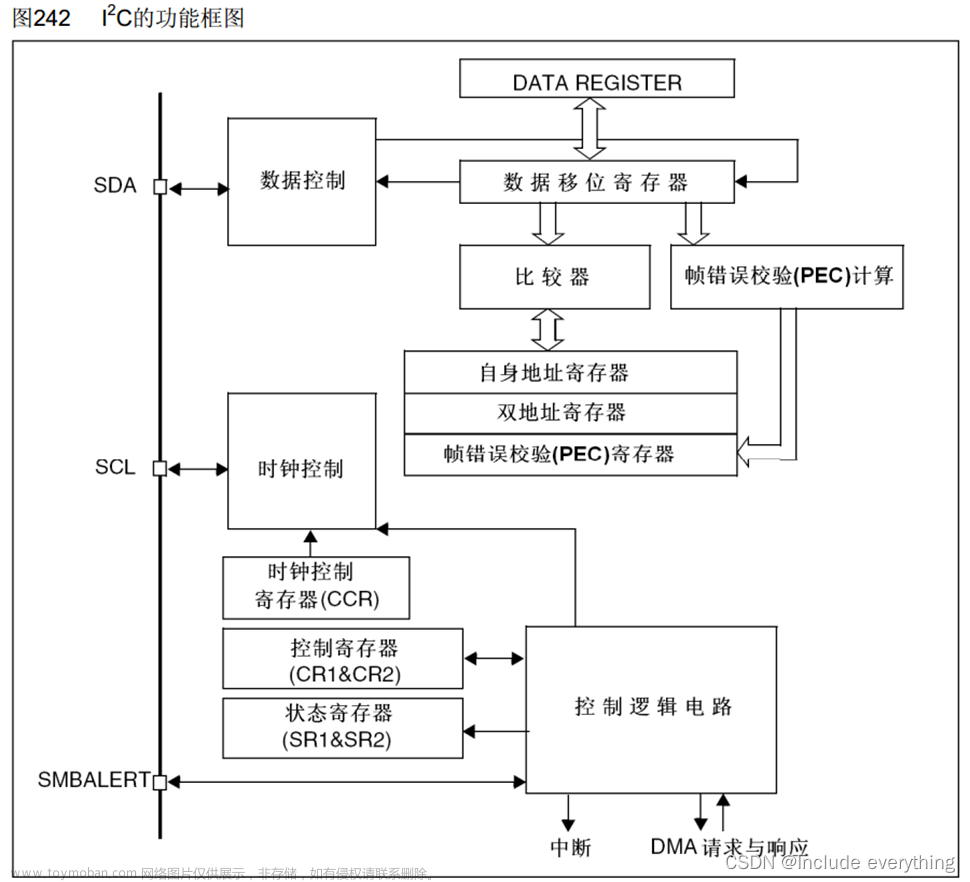
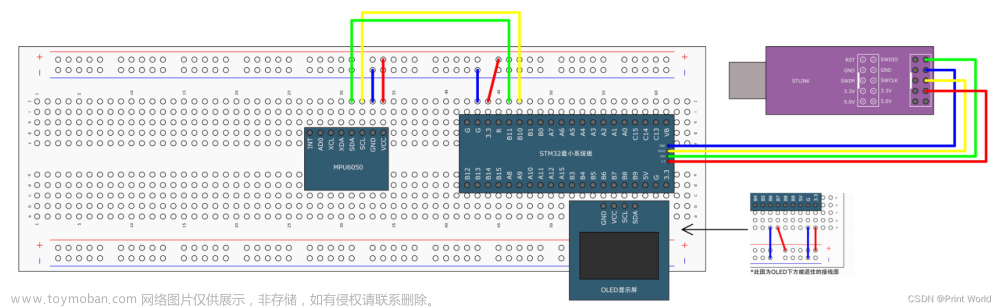
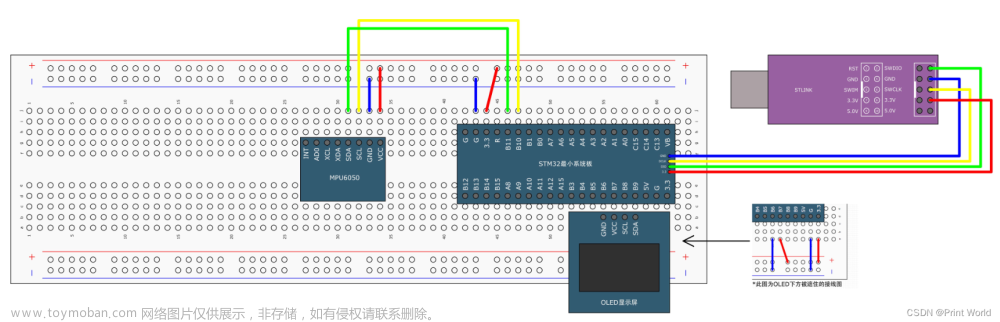
STM32CubeMx配置
配置使用外部高速时钟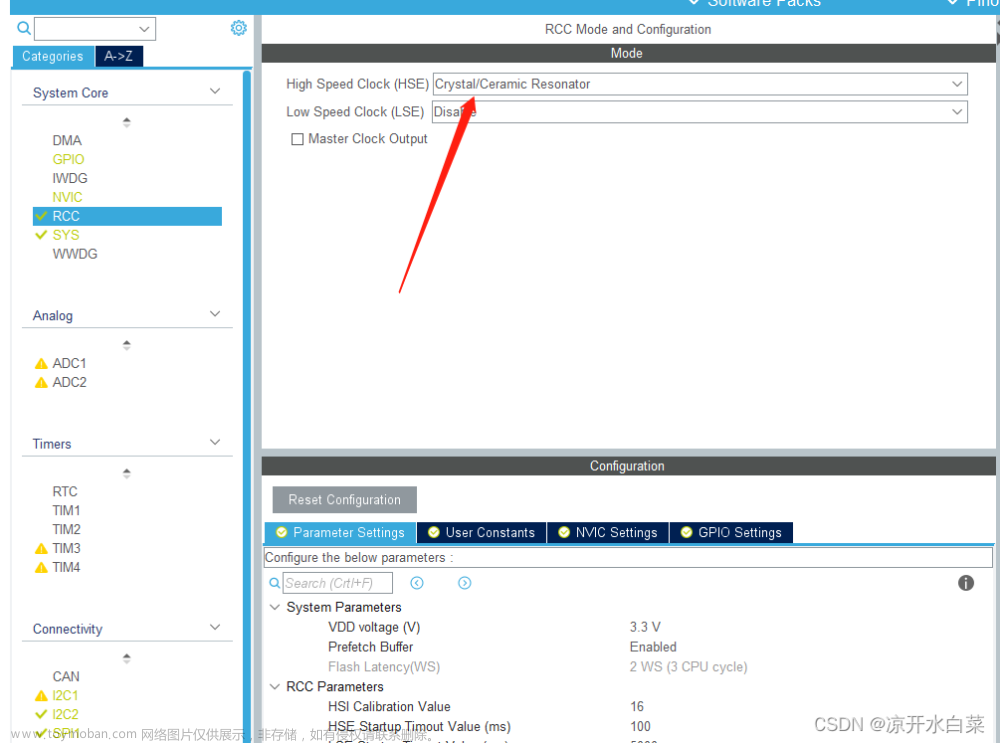
配置调试方式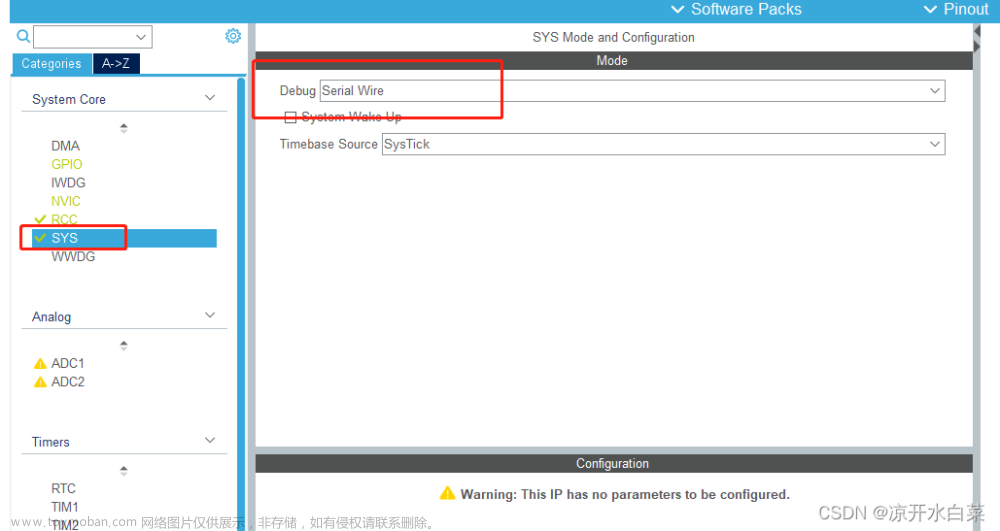
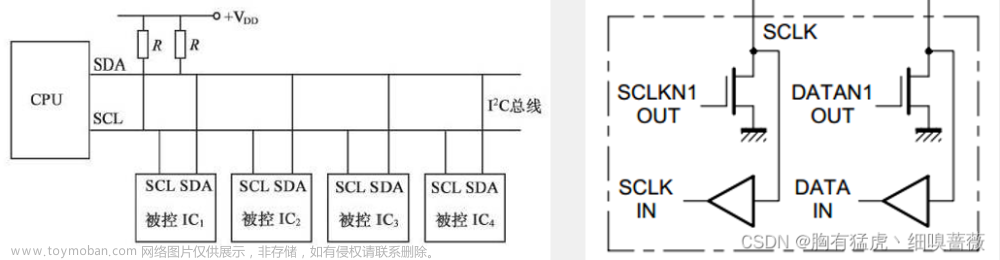
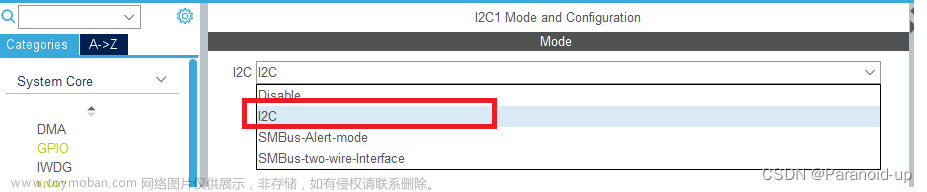
配置I2C,这里只需要选择I2C即可其余配置默认,记住自己选择的I2C引脚。
配置时钟
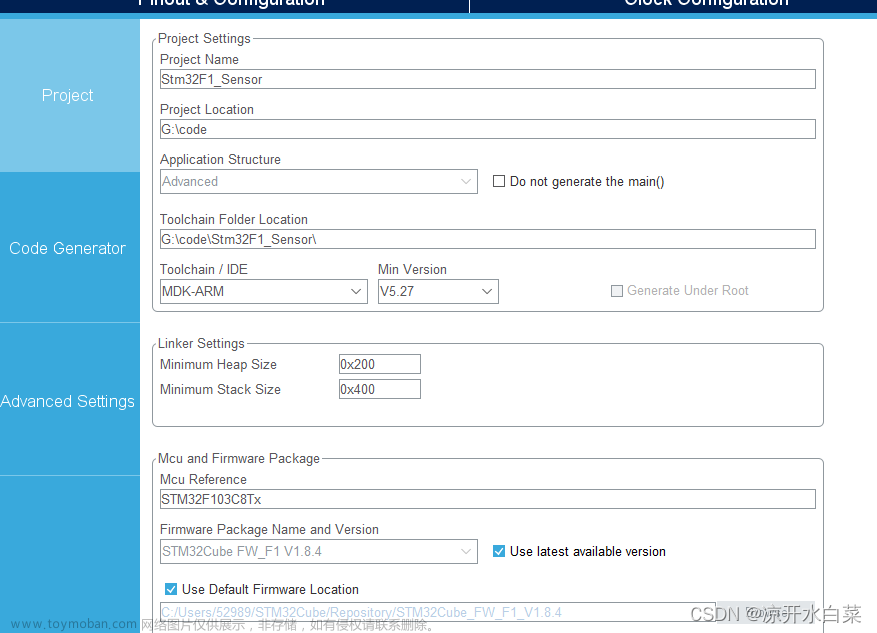
生成工程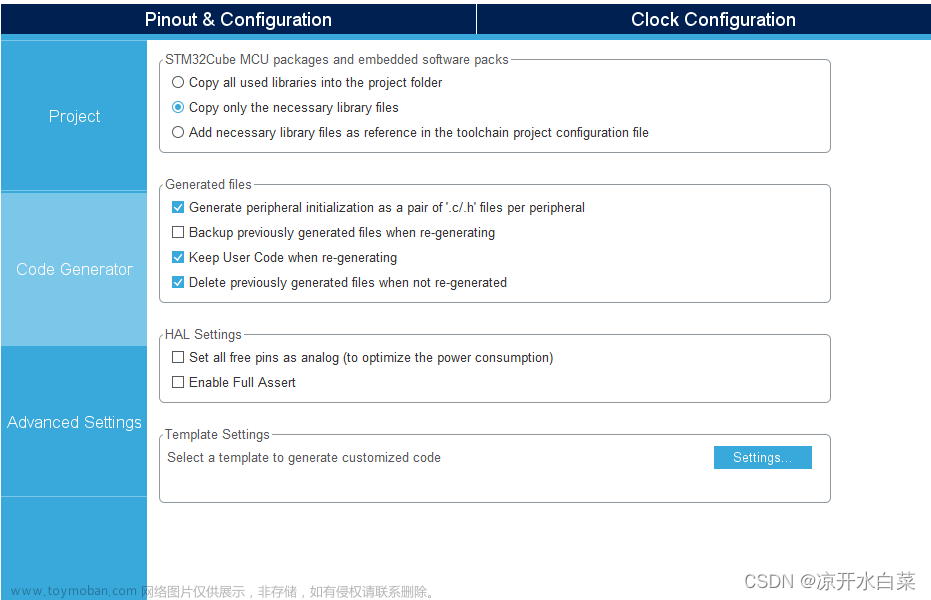
 文章来源:https://www.toymoban.com/news/detail-598519.html
文章来源:https://www.toymoban.com/news/detail-598519.html
代码文件
mpu6050.h文件
#ifndef __MPU6050_H
#define __MPU6050_H
#include "main.h"
#define SMPLRT_DIV 0x19 // 采样率分频,典型值:0x07(125Hz) */
#define CONFIG 0x1A // 低通滤波频率,典型值:0x06(5Hz) */
#define GYRO_CONFIG 0x1B // 陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s) */
#define ACCEL_CONFIG 0x1C // 加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz) */
#define ACCEL_XOUT_H 0x3B // 存储最近的X轴、Y轴、Z轴加速度感应器的测量值 */
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41 // 存储的最近温度传感器的测量值 */
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43 // 存储最近的X轴、Y轴、Z轴陀螺仪感应器的测量值 */
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define PWR_MGMT_1 0x6B // 电源管理,典型值:0x00(正常启用) */
#define WHO_AM_I 0x75 // IIC地址寄存器(默认数值0x68,只读) */
#define MPU6050_ADDR 0xD0 // MPU6050手册上的地址,这里也可以使用serch函数去搜索
typedef struct{
// 角速度
float Accel_X;
float Accel_Y;
float Accel_Z;
// 角度
float Gyro_X;
float Gyro_Y;
float Gyro_Z;
// 温度
float Temp;
}MPU6050DATATYPE;
extern MPU6050DATATYPE Mpu6050_Data;
extern I2C_HandleTypeDef hi2c1;
extern I2C_HandleTypeDef hi2c2;
int16_t Sensor_I2C2_Serch(void);
int8_t MPU6050_Init(int16_t Addr);
int8_t Sensor_I2C2_ReadOneByte(uint16_t DevAddr, uint16_t MemAddr, uint8_t *oData);
int8_t Sensor_I2C2_WriteOneByte(uint16_t DevAddr, uint16_t MemAddr, uint8_t *iData);
void MPU6050_Read_Accel(void);
void MPU6050_Read_Gyro(void);
void MPU6050_Read_Temp(void);
#endif
mpu6050.c文件
#include "mpu6050.h"
static int16_t Mpu6050Addr = 0x68;
MPU6050DATATYPE Mpu6050_Data;
int8_t Sensor_I2C2_Read(uint16_t DevAddr, uint16_t MemAddr, uint8_t *oData, uint8_t DataLen)
{
return HAL_I2C_Mem_Read(&hi2c2,DevAddr,MemAddr,1,oData,DataLen,1000);
}
int8_t Sensor_I2C2_Write(uint16_t DevAddr, uint16_t MemAddr, uint8_t *iData, uint8_t DataLen)
{
return HAL_I2C_Mem_Write(&hi2c2,DevAddr,MemAddr,1,iData,DataLen,1000);
}
int16_t Sensor_I2C2_Serch(void)
{
for(uint8_t i = 1; i < 255; i++)
{
if(HAL_I2C_IsDeviceReady(&hi2c2, i, 1, 1000) == HAL_OK)
{
Mpu6050Addr = i;
return i;
}
}
return 0xD1;
}
int8_t MPU6050_Init(int16_t Addr)
{
uint8_t check;
HAL_I2C_Mem_Read(&hi2c2,Addr,WHO_AM_I,1,&check,1,1000);
if(check == 0x68) // 确认设备用 地址寄存器
{
check = 0x00;
Sensor_I2C2_Write(Addr,PWR_MGMT_1,&check, 1); // 唤醒
check = 0x07;
Sensor_I2C2_Write(Addr,SMPLRT_DIV,&check, 1); // 1Khz的速率
check = 0x00;
Sensor_I2C2_Write(Addr,ACCEL_CONFIG,&check, 1); // 加速度配置
check = 0x00;
Sensor_I2C2_Write(Addr,GYRO_CONFIG,&check, 1); // 陀螺配置
return 0;
}
return -1;
}
void MPU6050_Read_Accel(void)
{
uint8_t Read_Buf[6];
// 寄存器依次是加速度X高 - 加速度X低 - 加速度Y高位 - 加速度Y低位 - 加速度Z高位 - 加速度度Z低位
Sensor_I2C2_Read(Mpu6050Addr, ACCEL_XOUT_H, Read_Buf, 6);
Mpu6050_Data.Accel_X = (int16_t)(Read_Buf[0] << 8 | Read_Buf[1]);
Mpu6050_Data.Accel_Y = (int16_t)(Read_Buf[2] << 8 | Read_Buf[3]);
Mpu6050_Data.Accel_Z = (int16_t)(Read_Buf[4] << 8 | Read_Buf[5]);
Mpu6050_Data.Accel_X = Mpu6050_Data.Accel_X / 16384.0f;
Mpu6050_Data.Accel_Y = Mpu6050_Data.Accel_Y / 16384.0f;
Mpu6050_Data.Accel_Z = Mpu6050_Data.Accel_Z / 16384.0f;
}
void MPU6050_Read_Gyro(void)
{
uint8_t Read_Buf[6];
// 寄存器依次是角度X高 - 角度X低 - 角度Y高位 - 角度Y低位 - 角度Z高位 - 角度Z低位
Sensor_I2C2_Read(Mpu6050Addr, GYRO_XOUT_H, Read_Buf, 6);
Mpu6050_Data.Gyro_X = (int16_t)(Read_Buf[0] << 8 | Read_Buf[1]);
Mpu6050_Data.Gyro_Y = (int16_t)(Read_Buf[2] << 8 | Read_Buf[3]);
Mpu6050_Data.Gyro_Z = (int16_t)(Read_Buf[4] << 8 | Read_Buf[5]);
Mpu6050_Data.Gyro_X = Mpu6050_Data.Gyro_X / 131.0f;
Mpu6050_Data.Gyro_Y = Mpu6050_Data.Gyro_Y / 131.0f;
Mpu6050_Data.Gyro_Z = Mpu6050_Data.Gyro_Z / 131.0f;
}
void MPU6050_Read_Temp(void)
{
uint8_t Read_Buf[2];
Sensor_I2C2_Read(Mpu6050Addr, TEMP_OUT_H, Read_Buf, 2);
Mpu6050_Data.Temp = (int16_t)(Read_Buf[0] << 8 | Read_Buf[1]);
Mpu6050_Data.Temp = 36.53f + (Mpu6050_Data.Temp / 340.0f);
}
main.c文件
MPU6050_Init(Sensor_I2C2_Serch());
while(1)
{
HAL_Delay(500);
MPU6050_Read_Accel();
MPU6050_Read_Gyro();
MPU6050_Read_Temp();
}
总结
MPU6050的数据的读取非常的简单,但是这个数据还无法直接使用,这里我只是用来联系I2C的读取,对于六轴的算法还有很多,可以转移到别的博主文章进行学习参考。文章来源地址https://www.toymoban.com/news/detail-598519.html
到了这里,关于【STM32】I2C练习,HAL库读取MPU6050角度陀螺仪的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!