1.前言
近日在研究如何提高LCD的刷新率,修改程序发现LCD屏幕用的是模拟通信,所以刷新特别慢,在设置硬件SPI,并使用通过HAL库HAL_SPI_Transmit()函数发送数据后刷新率并没有提升,为此疑惑了很久。
对此研究了整整一两天,网上找到可能的答案并在此记录一下,网上说可能是“HAL库的HAL_SPI_Transmit()函数其实并没有这么快,建议改一下寄存器的方法试一试”,也许是HAL库并不完善,之后我尝试该方法,发现刷新率瞬间提高了。
设备芯片用的是STM32F103C8T6,目的仅仅是通过SPI发送数据给LCD屏幕,而手册规定STM32的SPI时钟最快是18MHz。对于STM32F103的SPI1接口时钟,由72M的PCLK2分频得到,所以分配系数大于等于4(72M/4 = 18M)。对于STM32F103的SPI2/3接口时钟,由36M的PCLK1分频得到,所以分配系数等于2时候达到最高速率,可以更快,但可能不稳定。
由于实验只是LCD刷屏或者实时显示大字体文字刷新速率提高,没有CS片选信号,只需要两条线SCK和SDA。代码基于HAL库开发,只是在SPI配置上直接用寄存器写,小知识在正点原子的库函数和HAL库中写寄存器操作都是通用的,因为无论是标准库还是库函数都是实现对寄存器操作的封装。
2.SPI协议概括
SPI协议简单介绍一下。SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。SPI接口主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。SPI,是一种高速的,全双工,同步的通信总线。
3.SPI相关代码
spi.h
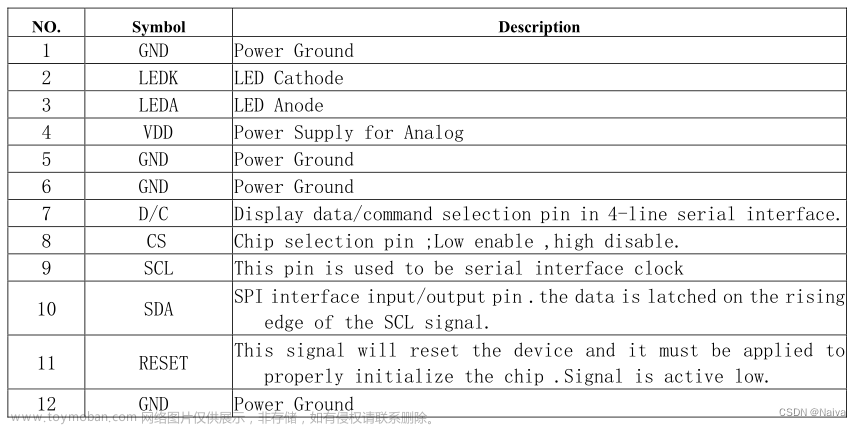
SDA连接PB15 SCK连接PB13(端口选择要根据自己的原理图修改,寻找支持SPI的引脚)
#ifndef __SPI_H
#define __SPI_H
#include "sys.h"
/* SPI接口定义 */
#define SPI_INTERFACE SPI2
#define SPI_PRESCALER SPI_BAUDRATEPRESCALER_2
#define SPI_CLK_ENABLE() do{ __HAL_RCC_SPI2_CLK_ENABLE(); }while(0)
/* 引脚定义 */
#define SPI_SCK_GPIO_PORT GPIOB
#define SPI_SCK_GPIO_PIN GPIO_PIN_13
#define SPI_SCK_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0)
#define SPI_SDA_GPIO_PORT GPIOB
#define SPI_SDA_GPIO_PIN GPIO_PIN_15
#define SPI_SDA_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0)
/* 操作函数 */
void SPI2_Init(void);
void SPI2_SetSpeed(u8 SpeedSet);
u8 SPI2_WriteData(u8 *TxData, u16 size);
#endif
spi.c
该文件在SPI的GPIO设置初始化中运用了HAL库,其他设置用寄存器,特别是函数编写部分。
#include "spi.h"
/**
* @brief SPI接口初始化
* @param 无
* @retval 无
*/
void SPI2_Init(void)
{
GPIO_InitTypeDef SPI2_Init_Struct;
/* 使能时钟 */
SPI_CLK_ENABLE();
SPI_SCK_GPIO_CLK_ENABLE();
SPI_SDA_GPIO_CLK_ENABLE();
/* 初始化SCK引脚 */
SPI2_Init_Struct.Pin = SPI_SCK_GPIO_PIN;
SPI2_Init_Struct.Mode = GPIO_MODE_AF_PP;
SPI2_Init_Struct.Pull = GPIO_PULLUP;
SPI2_Init_Struct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(SPI_SCK_GPIO_PORT, &SPI2_Init_Struct);
/* 初始化SDA引脚 */
SPI2_Init_Struct.Pin = SPI_SDA_GPIO_PIN;
SPI2_Init_Struct.Mode = GPIO_MODE_AF_PP;
SPI2_Init_Struct.Pull = GPIO_PULLUP;
SPI2_Init_Struct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(SPI_SDA_GPIO_PORT, &SPI2_Init_Struct);
RCC->APB1RSTR|=1<<14; //复位SPI2
RCC->APB1RSTR&=~(1<<14);//停止复位SPI2
SPI2->CR1|=0<<10;//全双工模式
SPI2->CR1|=1<<9; //软件nss管理
SPI2->CR1|=1<<8;
SPI2->CR1|=1<<2; //SPI主机
SPI2->CR1|=0<<11;//8bit数据格式
SPI2->CR1|=1<<1; //空闲模式下SCK为1 CPOL=1
SPI2->CR1|=1<<0; //数据采样从第二个时间边沿开始,CPHA=1
SPI2->CR1|=7<<3; //Fsck=Fcpu/256
SPI2->CR1|=0<<7; //MSBfirst
SPI2->CR1|=1<<6; //SPI设备使能
SPI2->I2SCFGR&=~(1<<11);//选择SPI模式
SPI2_ReadWriteByte(0xff);//启动传输(主要作用:维持MOSI为高)
}
void SPI2_SetSpeed(u8 SpeedSet)
{
SpeedSet&=0X07; //限制范围
SPI2->CR1&=0XFFC7;
SPI2->CR1|=SpeedSet<<3; //设置SPI2速度
SPI2->CR1|=1<<6; //SPI设备使能
}
u8 SPI2_WriteData(u8 *TxData, u16 size)
{
u16 i=0;
for(i=0;i<size;i++)
{
SPI2->DR=TxData[i];
while((SPI2->SR&1<<1)==0); //等待发送区空
}
return 1;
}接下来就是LCD部分代码,其实只要更改两个函数即可,因为其他写文字刷屏的函数都是基于这两个函数写数据的。文章来源:https://www.toymoban.com/news/detail-598653.html
//写寄存器函数(命令)
void LCD_WR_REG(u8 cmd)
{
LCD_RS=0;//RS=0的时候写命令
SPI2_WriteData(&cmd,sizeof(cmd));
}
//写LCD数据
void LCD_WR_DATA(u8 data)
{
LCD_RS=1;//RS=1的时候写数据
SPI2_WriteData(&data,siezof(data));
}这些函数都是基于正点原子的历程修改的,硬件SPI加上后LCD刷屏速率应该会加快很多,其实可以更快就是加上DMA取数据。文章来源地址https://www.toymoban.com/news/detail-598653.html
到了这里,关于硬件SPI+LCD增强屏幕刷新率的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!



![[桌面运维] 显示器 色准,色域,色深,分辨率,带宽,刷新率的基本概念,图像呈现的基本原理](https://imgs.yssmx.com/Uploads/2024/02/537503-1.gif)