PID控制器是工业自动化控制中最常用的一种控制器,它可以实现系统的稳定控制和精确调节。然而,PID控制器的效果与调参有着极大的关系,良好的调参能够使得PID控制器的控制效果更加优秀。本文将详细介绍PID控制器的调参技术。
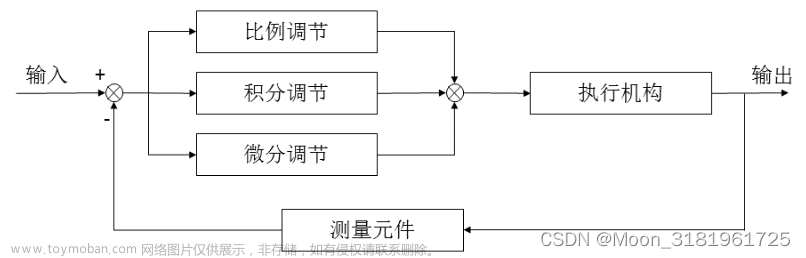
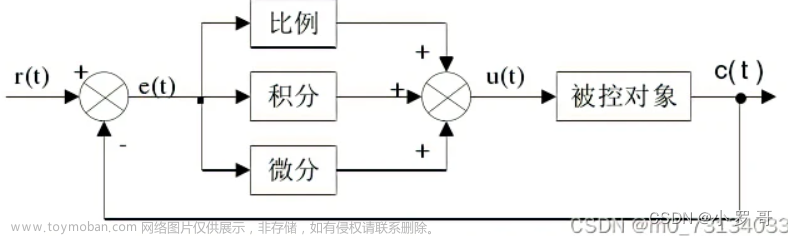
PID控制器由比例项、积分项和微分项三部分组成,其控制效果由三项的参数(Kp、Ki、Kd)决定。为了达到最优控制效果,需要对PID控制器进行调参。调参的过程通常分为以下几个步骤:
1.确定比例系数Kp 比例系数Kp反映了控制器对偏差的响应程度,当Kp值过大时,系统容易产生震荡,过小则控制效果不佳。调参时可以从小到大逐渐增加Kp值,直到系统出现震荡为止,然后适当减小Kp值以保证控制效果。
2.确定积分时间Ki 积分时间Ki决定了积分作用的响应速度,Ki值越大,积分作用越缓慢。当Ki值过大时,系统容易产生积分饱和现象,过小则系统可能出现超调。调参时可以先将Ki值设为较大值,然后逐渐减小直到系统出现超调为止。
3.确定微分时间Kd微分时间Kd决定了微分作用的响应速度,Kd值越大,微分作用越缓慢。当Kd值过大时,系统会出现震荡,过小则系统容易产生噪声干扰。调参时可以先将Kd值设为较小值,然后逐渐增大直到系统出现震荡为止,然后再适当减小Kd值以保证控制效果。
4.综合调整 在确定Kp、Ki、Kd三个参数之后,需要对三个参数进行综合调整,以得到最优的控制效果。一般来说,调参的目标是使系统具有快速响应、较小超调和较小稳态误差。文章来源:https://www.toymoban.com/news/detail-599165.html
总的来说,PID控制器的调参需要结合实际控制系统的特点进行,通过不断调整参数以达到最优控制效果。在实际应用中,还需要注意控制系统的稳定性和鲁棒性。文章来源地址https://www.toymoban.com/news/detail-599165.html
到了这里,关于PID控制器调参的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!