前几节都是在讲树莓派与外部的元件通信,本节来讲树莓派如何与电脑通信

本篇文章会教大家开发一个这样的上位机软件,用来和Pico通信,文章较长,耐心看完
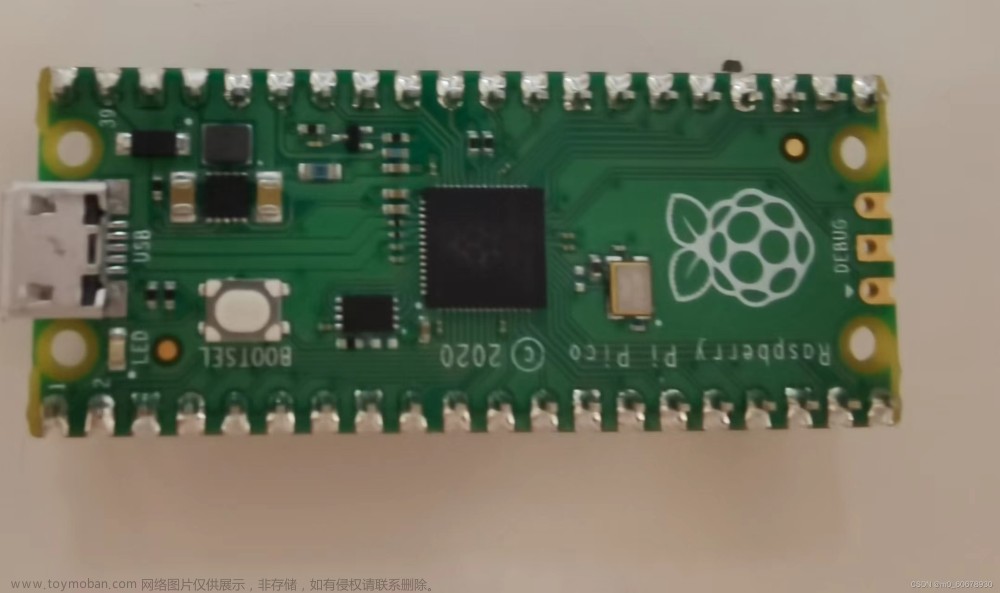
先看一下树莓派Pico的引脚图吧

我们可以看到上面有UART的引脚,UART又分为TX和RX
UART是串口的一种,可以用来通信,包括单片机和电脑,单片机和单片机,单片机和其它带串口的外设
UART是全双工的,也就是说发送的发送的同时可以接收数据,UART需要三根线,一根TX(发送),一根RX(接收)和一根GND(共地)
串口模块:
现在的电脑都不带串口了,我们需要一个USB转串口模块来给电脑增加串口能力
如图所示:
网上很容易买到这样的USB转串口模块,只需几块钱,用的是CH340芯片

这个模块一头插电脑,另一头的引脚可以通过杜邦线连接Pico或其它单片机,这些引脚上面都要标注,别插错就可以了
买到模块后找店家要一个驱动,安装驱动后,可以测试下模块是否正常工作,将模块插入电脑,设备管理器里面出现新的串口设备说明驱动安装成功
然后使用一根杜邦线将TXD脚和RXD脚连接起来,这样这个模块发送的数据就会被自己接收到了
连接完成后,打开串口调试助手
里面选择自己的串口号,点击打开,同时将接收区设置中的十六进制显示去掉

在下面的输入窗口中输入数据,点击发送,上面的接收窗口就能收到相同的数据了,说明串口模块工作正常
Pico连接串口:
1号脚是串口的TX
2号脚是串口的RX
3号脚是GND,也要用到
这三个脚接到USB转串口模块的对应引脚上
TX接RX,RX接TX,GND接模块的GND(需要共地才能通信)
连接完成后给Pico编写串口通信代码:
import time
from machine import UART, Pin
led = Pin(25, Pin.OUT)
uart = UART(0, baudrate=9600, bits=8, stop=1)
while True:
led.toggle()
time.sleep(1)
uart.write('hello-world\n')首先引入UART包,然后初始化一个uart对象
uart需要设置几个参数
第一个是串口号,设置为0代表用Pico上的第一个串口
baudrate设置串口通信的波特率
bits设置通信的数据位为8位
stop设置停止位为1位
代码写完上传到Pico中
然后打开串口助手工具

串口设置要和Pico中的配置保持一致,比如波特率写9600,两边都要写9600
然后打开串口,就能源源不断收到Pico发送的数据了
然后我们来通过Python写一个小工具,用来代替串口调试助手 读取串口数据
Python提供了一个串口操作的包,pyserial
需要先安装这个包
pip install pyserial然后编写代码,操作串口
import serial
com = serial.Serial("COM4", 9600)
if com.isOpen():
print("打开串口成功")
print(com.name)
try:
while True:
read_data = com.read()
if read_data:
print(read_data)
except:
print('err')
finally:
com.close()
else:
print("打开串口失败")代码写完后,将串口调试助手的串口操作关闭掉,运行上面的Python脚本,也能源源不断输出Pico发送的数据了
上位机程序:
最后来编写一个上位机程序控制Pico
上位机是一个运行在电脑或手机上的程序,可以操作单片机
我们编写一个Python界面程序来给Pico发送指令,Pico收到指令后执行开灯或者关灯操作
使用PySimpleGui来编写界面
需要先安装包
pip install PySimpleGUI然后编写如下代码:
import PySimpleGUI as sg
import serial
from serial.rfc2217 import Serial
from serial.tools import list_ports
def get_com_list():
"""
获取串口列表
:return:
"""
ports = list_ports.comports(include_links=False)
return [port.device for port in ports]
def get_baudrates_list():
"""
获取波特率列表
:return:
"""
return [item for item in Serial.BAUDRATES]
if __name__ == '__main__':
com_list = get_com_list()
baudrates_list = get_baudrates_list()
com: serial.Serial = None
layout = [[sg.Text('通过按钮控制Pico点亮/熄灭LED')],
[sg.HorizontalSeparator()],
[sg.Text('串口:'), sg.InputCombo(com_list, readonly=True, key='com'),
sg.Button('刷新', key='refresh_com_list')],
[sg.Text('波特率:'), sg.InputCombo(baudrates_list, readonly=True, default_value=115200, key='baudrates')],
[sg.Button('打开串口', key='open_serial'), sg.Button('关闭串口', key='close_serial')],
[sg.HorizontalSeparator()],
[sg.Button('开灯', key='open_led'), sg.Button('关灯', key='close_led')]]
window = sg.Window('Pico上位机程序v1.0', layout, size=(300, 200))
while True:
event, values = window.read()
if event == sg.WIN_CLOSED:
break
elif event == 'refresh_com_list':
# 刷新串口列表
com_list = get_com_list()
window['com'].update(values=com_list)
elif event == 'open_serial':
# 打开串口
selected_com = values['com']
selected_baudrates = values['baudrates']
if not selected_com:
sg.Popup('请选择串口')
elif not selected_baudrates:
sg.Popup('请选择波特率')
else:
if not com:
print(f'open serial: {selected_com}')
com = serial.Serial(selected_com, int(selected_baudrates))
elif event == 'close_serial':
# 关闭串口
if com and com.isOpen():
print('close serial')
com.close()
com = None
elif event == 'open_led':
if com and com.isOpen():
print('send open led command')
com.write(b'open_led\n')
elif event == 'close_led':
if com and com.isOpen():
print('send close led command')
com.write(b'close_led\n')
window.close()
上面这段代码会创建这样的窗口:
可以下拉选择串口,然后设置波特率,打开串口后就能发送指令了
这里定义了两个指令
开灯:
open_led\n关灯:
close_led\n这两个指令会通过串口发送到Pico设备,Pico收到后判断指令然后执行相应的动作
Pico的代码如下:
import time
from machine import UART, Pin
led = Pin(25, Pin.OUT)
uart = UART(0, baudrate=115200, bits=8, parity=None, stop=1)
uart.write('pico started!\n')
while True:
time.sleep(1)
if uart.any():
command = uart.readline()
if not command:
continue
command_str = command.decode()
uart.write('recv-{}\n'.format(command_str))
if command_str.startswith('open_led'):
led.value(1)
elif command_str.startswith('close_led'):
led.value(0)
循环接收串口消息,收到后判断是否为定义的指令
然后执行相应的动作文章来源:https://www.toymoban.com/news/detail-599425.html
以上就是一个简单的单片机与上位机通信的案例,大家可以稍加改造完成自己的控制功能文章来源地址https://www.toymoban.com/news/detail-599425.html
到了这里,关于【硬件控制】5. Pico使用串口与电脑通信的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!