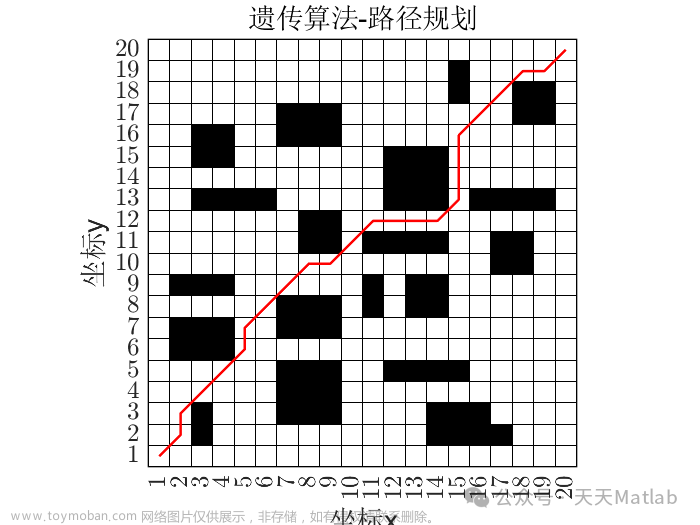
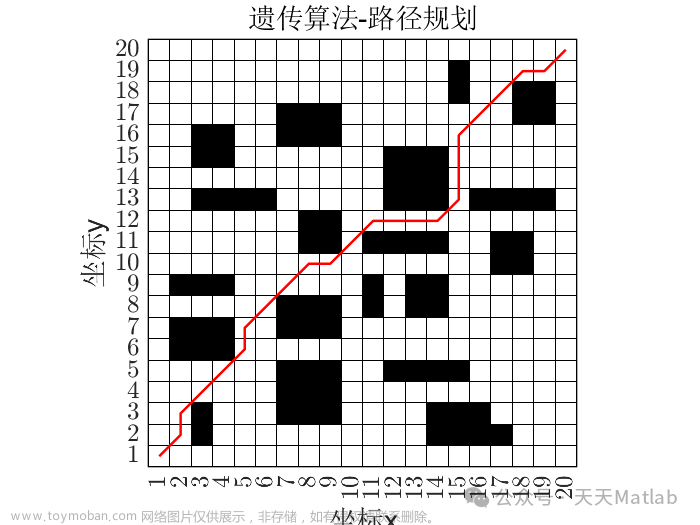
一,以下是一个简单的Q-learning算法在MATLAB中的实现,用于机器人路径规划:
% 初始化Q矩阵
Q = zeros(6,6);
% 设定参数
gamma = 0.8; % 折扣因子
alpha = 0.1; % 学习速率
num_episodes = 500; % 迭代次数
% 定义初始状态和目标状态
start_state = 1;
goal_state = 6;
% 定义迭代过程
for episode = 1:num_episodes
% 从起始状态开始
current_state = start_state;
% 直到到达目标状态
while current_state ~= goal_state
% 选择动作(基于epsilon-greedy策略)
if rand() < 0.1
% 探索
action = randi([1,6]);
else
% 利用Q值选择
[~,action] = max(Q(current_state,:));
end
% 获取下一个状态和奖励
next_state = action;
reward = 0;
% 更新Q值
Q(current_state,action) = Q(current_state,action) + alpha * (reward + gamma * max(Q(next_state,:)) - Q(current_state,action));
% 更新当前状态
current_state = next_state;
end
end
% 测试Q-learning算法的效果
current_state = start_state;
path = [current_state];
while current_state ~= goal_state
% 根据最大Q值选择下一个状态
[~,action] = max(Q(current_state,:));
% 更新当前状态
current_state = action;
% 将路径添加到列表中
path = [path,current_state];
end
% 打印最优路径
fprintf('最优路径:');
disp(path);
此代码实现了一个简单的Q-learning算法,其中有一个Q矩阵,用于存储状态-动作对的Q值。在迭代过程中,机器人根据epsilon-greedy策略选择动作,并且更新Q值。在测试过程中,机器人利用Q值选择最优路径。
二.
这个代码是完整的MATLAB代码,但是它需要一个环境,其中包括一个机器人模型和一个迷宫或环境,以便测试和可视化路径规划。因此,如果您没有这样的环境,该代码可能无法直接运行。
此外,这个代码可能需要根据您的具体问题进行修改,例如,您需要根据您的问题设置状态和动作空间,并选择适当的奖励函数。所以需要根据自己的需要进行修改。
要实现一个完整的机器人路径规划系统,需要一个机器人模型和一个环境或迷宫。下面是一个简单的示例,展示如何创建这些组件:
机器人模型
您可以使用机器人模型来表示机器人的状态和动作。机器人状态通常由机器人的位置和朝向组成,动作可以是机器人向前移动、向后移动、向左转或向右转等。在MATLAB中,您可以使用robotics系统工具箱来创建机器人模型,例如使用turtlebot模型。
% 创建一个机器人对象
robot = turtlebot;
环境或迷宫
您需要为机器人规划路径的环境或迷宫。这通常是一个二维网格地图,其中包括机器人可以通过的区域和障碍物。在MATLAB中,您可以使用imread函数加载地图图像,并将其转换为二进制图像,其中0表示障碍物,1表示可以通过的区域。例如:
% 加载地图图像
map = imread('map.png');
% 将图像转换为二进制图像
map = imbinarize(map);
连接机器人模型和环境
将机器人模型与环境或迷宫相连接,可以创建一个完整的路径规划系统。您可以使用robotics系统工具箱中的planner对象来规划路径,例如使用PRM(概率路标集)路径规划器:
% 创建一个PRM路径规划器对象
planner = robotics.PRM;
% 将地图设置为规划器的内部地图
planner.Map = robotics.BinaryOccupancyGrid(map);
% 将机器人对象设置为规划器的运动规划器
planner.MotionModel = robotics.MotionModel;
% 设置规划器的起点和终点
start_pose = [1 1 0];
goal_pose = [10 10 0];
planner.StartLocation = start_pose;
planner.EndLocation = goal_pose;
% 运行路径规划
[path,~] = plan(planner);文章来源:https://www.toymoban.com/news/detail-599555.html
这些是创建一个完整的机器人路径规划系统所需的基本组件,您可以根据自己的需求进行修改和扩展。文章来源地址https://www.toymoban.com/news/detail-599555.html
到了这里,关于Q-learning运用在机器人路径规划的matlab代码的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!