一、标注通用规则
数据标注是通过人工把需要识别和分辨的数据贴上标签。深度神经网络学习这些标注数据的特征,最终实现自主识别的功能。下面介绍几个目标检测中的标注通用规则:
- 1、贴边规则:标注框需紧贴目标物体的边缘进行画框标注,不可框小或框大。

- 2、重叠规则:当两个目标物体有重叠的时候,只要不是遮挡超过一半的就可以框的(遮挡范围需要根据算法识别情况制定),允许两个框有重叠的部分。如果其中一个物体挡住另一个物体一部分,框的时候就需要对另一个物体的形状进行脑补完整然后框起来即可。

- 3、独立规则:每一个目标物体均需要单独拉框,比如下图中三瓶水不能只拉一个框,而是要将三个目标分别拉框。

- 4、不框规则:图像模糊不清的不框,太暗和曝光过度的不框,不符合项目特殊规则的不框。

- 5、边界检查:确保框坐标不在图像边界上,防止载入数据或者数据扩展过程出现越界报错。

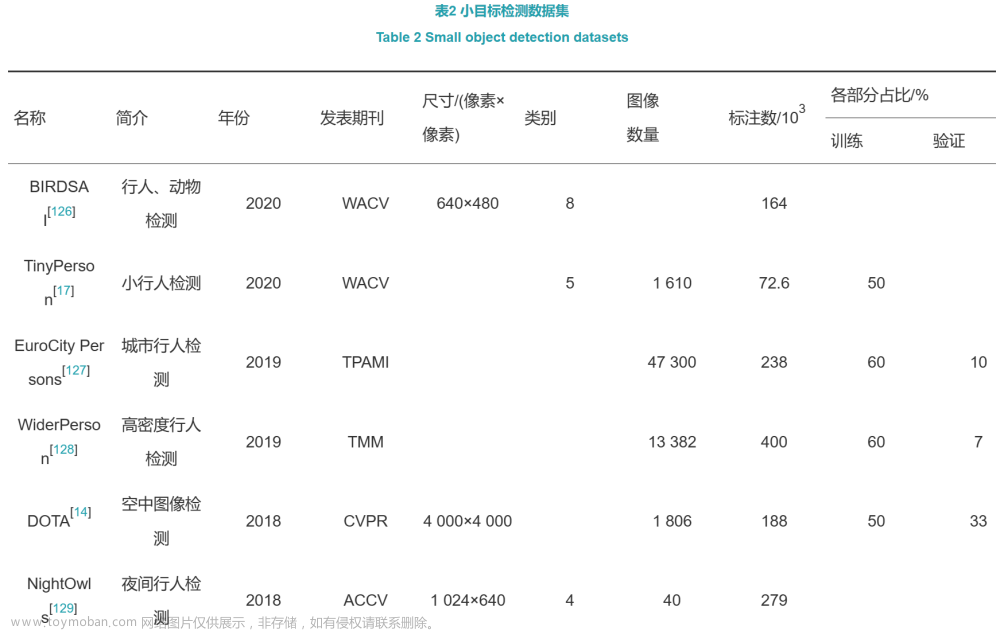
- 6、小目标规则:不同的算法对小目标的检测效果不同,对于小目标只要人眼能分清,都应该标出来。根据算法的需求,去决定是否启用这些样本参与训练。
文章来源地址https://www.toymoban.com/news/detail-600041.html
文章来源:https://www.toymoban.com/news/detail-600041.html
到了这里,关于目标检测制作数据集时画框的原则的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!