说明
自抗扰控制器(Active Disturbance Rejection Control, ADRC)是一种新型的控制策略,它具有强大的抗干扰能力和良好的控制性能。与传统的PID控制器相比,ADRC能够更好地抑制系统的干扰,提高控制系统的稳定性和鲁棒性。
在ADRC中,核心思想是引入一个扰动观测器(Disturbance Observer, DO),用于实时估计和补偿系统的干扰。DO通过对系统的输入和输出进行观测和分析,估计出干扰的大小和影响,并通过一个补偿器对其进行抵消。这样,即使系统受到外界干扰的影响,控制器仍能保持良好的控制性能。
与此同时,ADRC还引入了一个非线性扩张观测器(Nonlinear Extended State Observer, NESO),用于估计系统的非线性特性。NESO通过对系统的状态进行观测和分析,估计出系统的非线性影响,并通过一个补偿器对其进行抵消。这样,ADRC能够更好地处理非线性系统,并提高控制系统的鲁棒性和适应性。
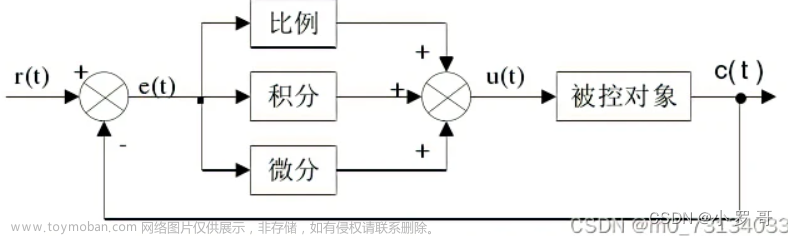
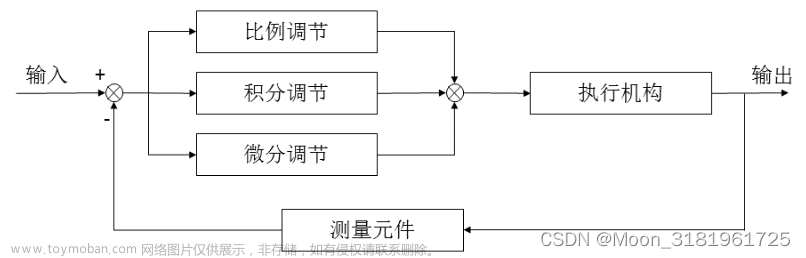
在ADRC中,PID控制器仍然起到了重要的作用。PID控制器通过对系统的误差进行反馈控制,调节控制器的输出,使系统的输出与期望值保持一致。与传统的PID控制器相比,ADRC中的PID控制器不仅能够抑制系统的干扰,还能够通过DO和NESO的补偿器进行干扰和非线性的补偿,从而进一步提高控制系统的性能。
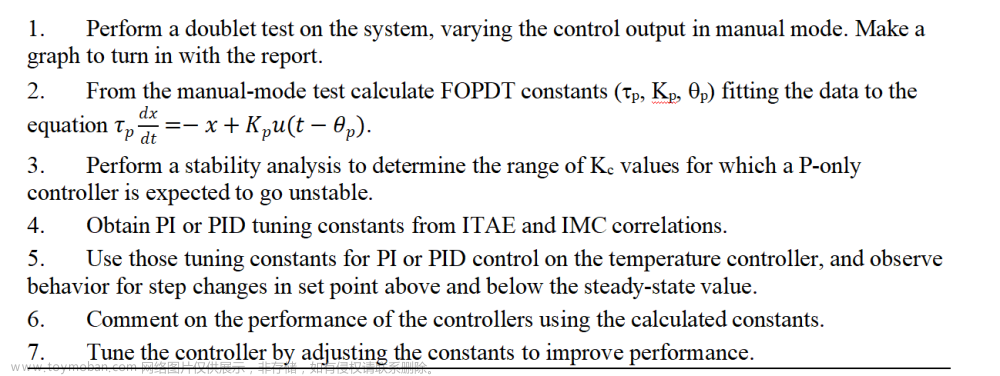
在实际应用中,ADRC可以通过Matlab进行设计和实现。首先,需要建立系统的数学模型,并确定系统的控制目标和性能要求。然后,根据系统的模型和性能要求,设计ADRC的参数和结构。最后,利用Matlab进行仿真和调试,验证ADRC的控制性能和稳定性。
总之,ADRC是一种新型的控制策略,具有强大的抗干扰能力和良好的控制性能。与传统的PID控制器相比,ADRC能够更好地抑制系统的干扰,提高控制系统的稳定性和鲁棒性。通过Matlab的设计和实现,ADRC可以在实际应用中发挥重要的作用,提高控制系统的性能和效果。文章来源:https://www.toymoban.com/news/detail-600270.html
源码下载
基于Matlab自抗扰控制器和PID控制(源码).rar:https://download.csdn.net/download/m0_62143653/88069912文章来源地址https://www.toymoban.com/news/detail-600270.html
到了这里,关于基于Matlab自抗扰控制器及其PID控制(附上完整源码+数据)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!