超声波雷达,是通过发射并接收40kHz的超声波,根据时间差算出障碍物距离。其测距精度是1~3cm.常见的超声波雷达有两种:第一种是安装在汽车前后保险杠上的,用于测量汽车前后障碍物的驻车雷达或倒车雷达,称为超声波驻车辅助传感器(Ultrasonic Parking Assistant, UPA);第二种是安装在汽车侧面,用于测量侧方障碍物距离的超声波雷达,称为自动泊车辅助传感器(Automatic Parking Assistant, APA).
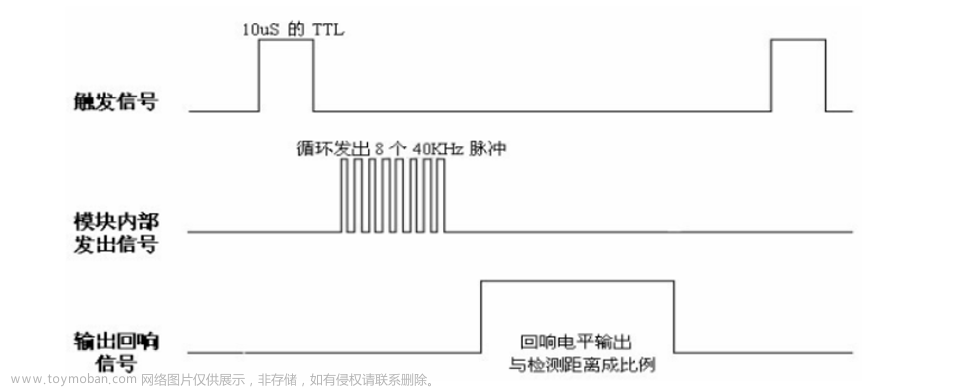
采用超声波雷达测距时,超声波发射器先向外面某一个方向发射出超声波信号,在发射超声波的同时开始计时,超声波通过空气进行传播,传播途中遇到障碍物就会立刻反射回来,超声波接收器在接收到反射波立即停止计时。计时器通过记录时间,就可以测算出从发射点到障碍物之间的距离。在空气中超声波的传播速度一般为340m/s,计时器通过记录时间t,就可以测算出从发射点到障碍物之间的距离长度s,即s=340t/2.
超声波雷达的工作原理可用图的数学模型来表示,其中α为超声波探测角,一般UPA的探测角为120度作用,APA的探测角较小为80度左右,β为超声波雷达检测宽度范围的影响元素之一,该角度一般较小。一般UPA的β为20度左右,APA的β较为特殊,为0度;R也是超声波雷达检测宽度范围的影响元素之一,UPA和APA的R值差别不大,都在0.6m左右;D是超声波雷达的最大量程。UPA的最大量程为2.5m,APA的最大量程为5m,目前已有超过7m的APA雷达投入使用。
超声波雷达具有诸多优点。超声波能量消耗较为缓慢,防水、防尘性能好,传播距离较远,穿透性强,测距方法简单,成本低,且不受光线条件的影响。尤其是短距离测量中,超声波雷达测距有着非常大的优势。但是,超声波是一种机械波,使得超声波雷达有着根源性局限性。文章来源地址https://www.toymoban.com/news/detail-600733.html
- 对温度敏感。超声波雷达的波速受温度影响,近似关系为

其中,C0 为0摄氏度时的波速,为332m/s,T为温度(单位:摄氏度)。波速受温度影响,因此测量精度也随温度直接相关。传播速度较慢时,若行驶速度较快,使用超声波测距无法跟上车距的实时变化,误差较大。 - 超声波散射角大,方向性差,无法精确描述障碍物位置。在测量较远距离的目标时,其回波信号较弱。
超声波雷达在自动驾驶汽车上主要用于泊车系统,辅助刹车等。通常一套倒车雷达需要安装4个UPA传感器,而自动泊车系统时在倒车雷达的基础上再加4个UPA传感器和4个APA传感器。UPA超声波传感器的探测距离一般在30~500cm之间,探测范围更远,因此相比于UPA成本更高,功率也更大。APA传感器与倒车雷达工作频率不同,不形成干扰。
超声波雷达的基础应用时倒车辅助。在这个过程中,超声波传感器通常需要同控制器和显示器结合使用,从而以声音或者更直观的显示方式告知驾驶员扫除视野死角和视线模糊的缺陷,提高驾驶安全性。障碍物检测外,超声波雷达还有很多应用场景,例如泊车位检测、高速横向辅助等。泊车位检测时是自动泊车系统的第一步,主要依赖安装在车辆侧方的APA传感器。在汽车缓缓驶过停车位时,如图所示,汽车侧方的APA传感器会得到一个探测距离与时间的关系,然后可以计算得到停车位的近似长度。当检测的停车位长度大于汽车泊入所需的最短长度时则认为当前空间有车位。超声波雷达还可应用于高速横向辅助,特斯拉Model S车型是一个很好的例子。特斯拉Model S在确保右侧有足够空间的情况下,会自主向右微调,降低与左侧车辆的碰撞风险。目前大部分车型搭载的超声波雷达都是倒车雷达UPA,而随着自动驾驶技术的不段推进,基于超声波的自动泊车功能逐渐进入大众视野,APA的市场也会逐渐打开。
文章来源:https://www.toymoban.com/news/detail-600733.html
到了这里,关于自动驾驶感知系统-超声波雷达的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!