目录
1、简介
2、CubeMX初始化配置
2.1 基础配置
2.1.1 SYS配置
2.1.2 RCC配置
2.2 ADC外设配置
2.3 串口外设配置
2.4 GPIO配置
2.5 项目生成
3、KEIL端程序整合
3.1 串口重映射
3.2 ADC数据采集
3.3 主函数代码整合
4 硬件连接
5 效果展示
1、简介
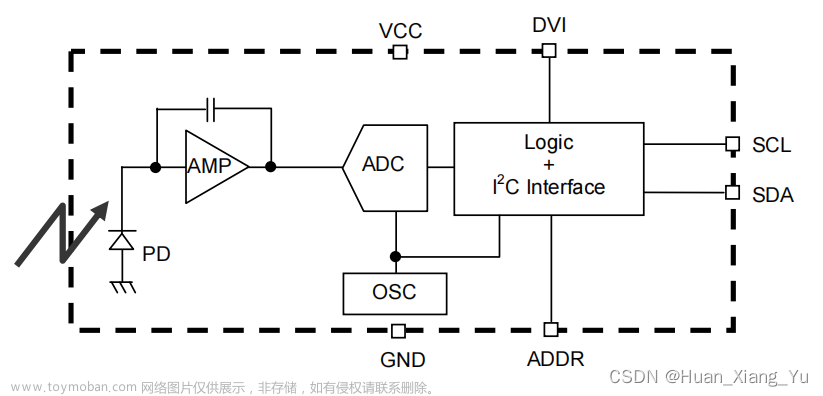
本文通过STM32F103C8T6单片机通过HAL库方式对AD8232心率传感器进行数据的读取,并通过串口来进行显示。
2、CubeMX初始化配置
2.1 基础配置
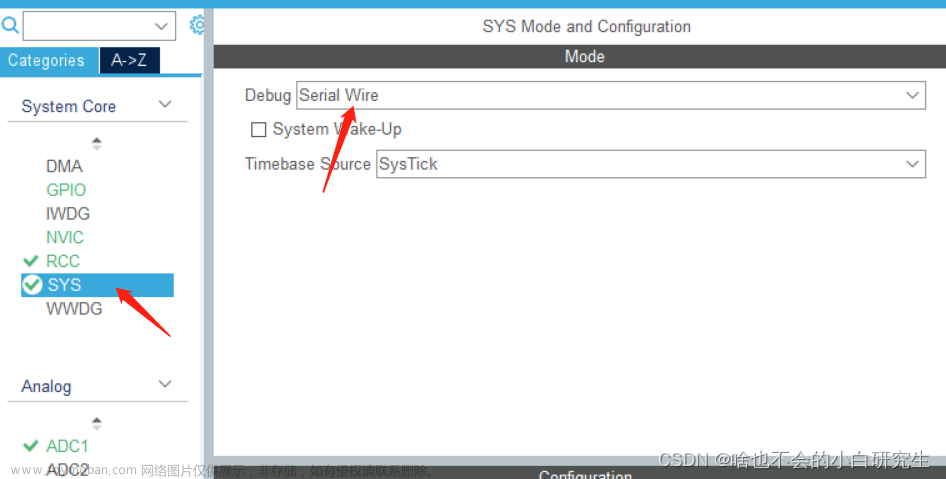
2.1.1 SYS配置
2.1.2 RCC配置

2.2 ADC外设配置

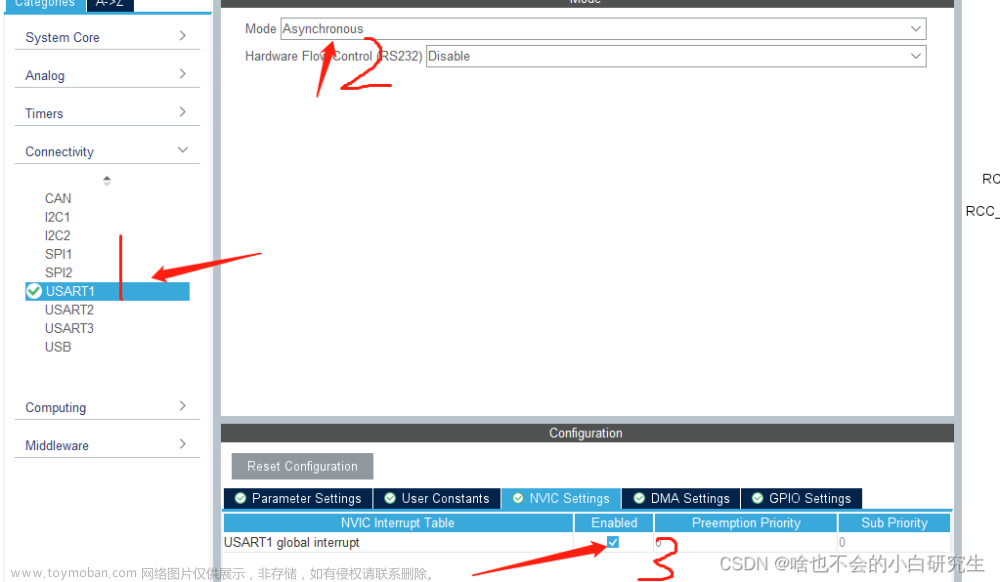
2.3 串口外设配置
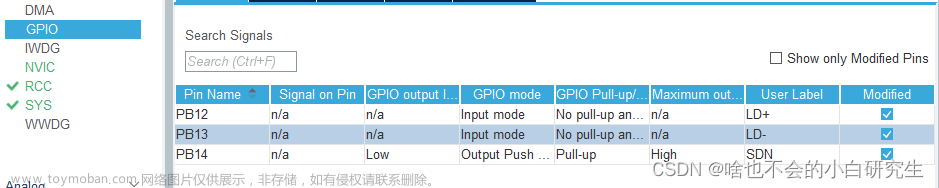
2.4 GPIO配置
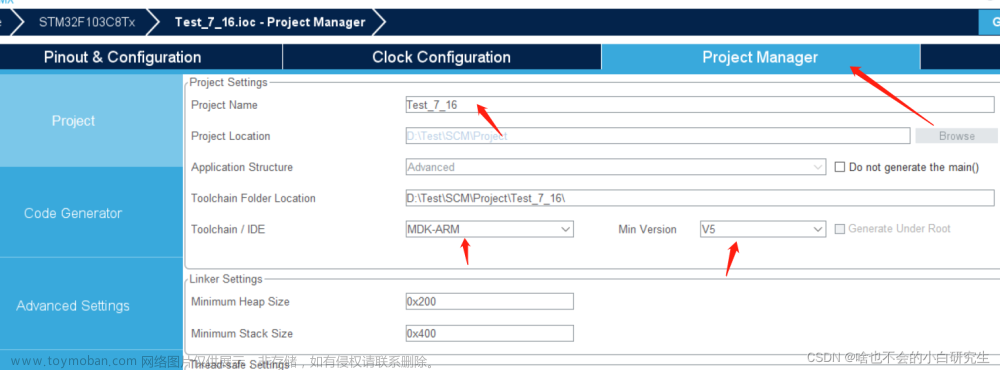
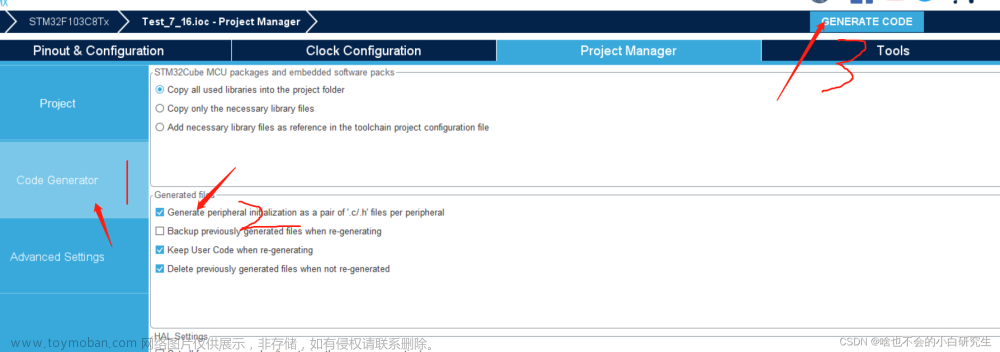
2.5 项目生成
3、KEIL端程序整合
3.1 串口重映射
具体步骤:stm32(HAL库)使用printf函数打印到串口
3.2 ADC数据采集
首先在adc.c最下方添加ADC采集程序,如下所示:
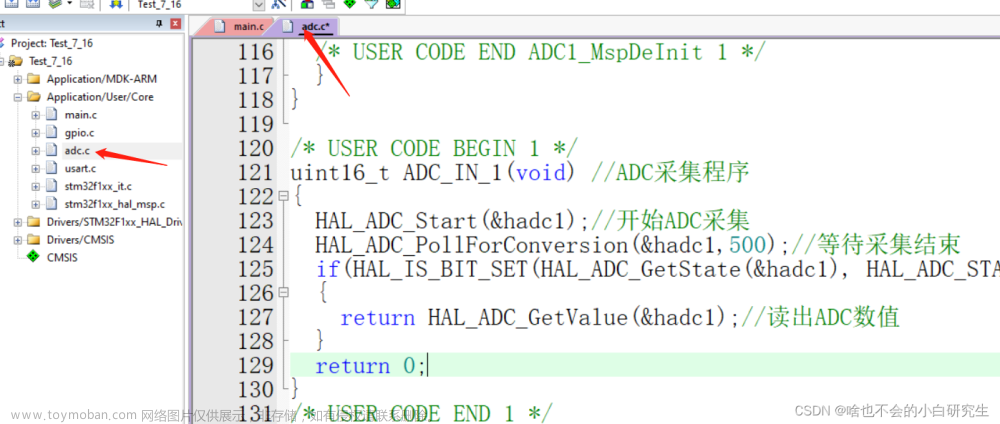
代码如下:
uint16_t ADC_IN_1(void) //ADC采集程序
{
HAL_ADC_Start(&hadc1);//开始ADC采集
HAL_ADC_PollForConversion(&hadc1,500);//等待采集结束
if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1), HAL_ADC_STATE_REG_EOC))//读取ADC完成标志位
{
return HAL_ADC_GetValue(&hadc1);//读出ADC数值
}
return 0;
}接着在adc.h中进行函数声明,如下图所示:

uint16_t ADC_IN_1(void);//ADC采集程序3.3 主函数代码整合
首先在mian.h进行宏定义,如下所示:
#define LD0 HAL_GPIO_ReadPin(LD__GPIO_Port, LD__Pin)
#define LD1 HAL_GPIO_ReadPin(LD_B13_GPIO_Port, LD_B13_Pin) 首先定义变量接受ADC_IN_1()采集数据,如下所示:
uint8_t adc_AD8232;接着在主函数While循环上方进行ADC采样校准,如下所示:
HAL_ADCEx_Calibration_Start(&hadc1);//ADC采样校准最后while循环中进行数据打印,如下所示:
while (1)
{
if(LD0==1||LD1==1){
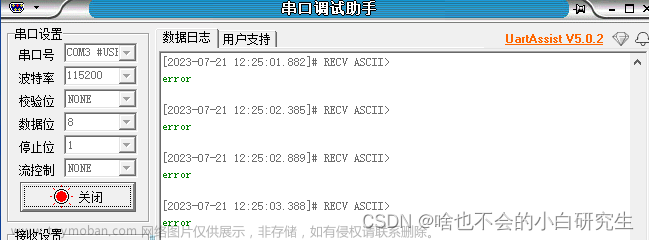
printf("error");
}
else{
adc_AD8232 = ADC_IN_1()/10;
printf("%d",adc_AD8232);
}
HAL_Delay(500);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}main.c如下所示:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
uint8_t adc_AD8232;
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_ADCEx_Calibration_Start(&hadc1);//ADC采样校准
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(LD0==1||LD1==1){
printf("error");
}
else{
adc_AD8232 = ADC_IN_1()/10;
printf("%d",adc_AD8232);
}
HAL_Delay(500);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC;
PeriphClkInit.AdcClockSelection = RCC_ADCPCLK2_DIV6;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
4 硬件连接
VCC ---- 3.3V
GND ---- GND
OUTPUT ---- PA1(ADC引脚)
LD+ ---- PB12(GPIO输入)
LD- ---- PB13(GPIO输入)
SDA ---- PB14(GPIO高电平输出)
注意:
LOD-,LOD+接到身上的三个电极,当接口脱落,这两个口某一个口会变为高电平。
SDN 开启和关闭模块功能,接到GPIO输出口,给它高电平则模块工作,给低电平则不工作。
5 效果展示
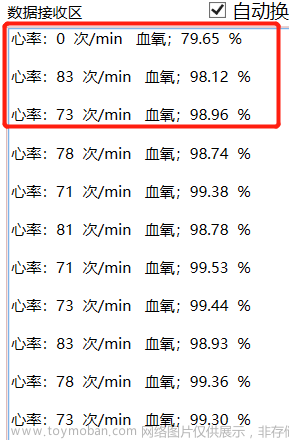
传感器接到身上,效果如下:

传感器接口脱落,效果如下:
文章来源:https://www.toymoban.com/news/detail-601095.html
上文如有错误,恳请各位大佬指正。文章来源地址https://www.toymoban.com/news/detail-601095.html
到了这里,关于STM32(HAL库)驱动AD8232心率传感器的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!


![[STM32]HAL库STM32CubeMX+DHT11温湿度传感器](https://imgs.yssmx.com/Uploads/2024/02/491665-1.png)