1 前言
配置设备树请参考上一章。此次说明还是以裕太的YT8511芯片为例。
2 需要配置的文件及路径
a. 在 .. /drivers/net/phy 目录下添加 yt_phy.c 文件(一般来说该驱动文件由厂家提供);
b. 修改.. /drivers/net/phy 目录下的 Kconfig 文件,如下图所示。

c. 修改.. /drivers/net/phy 目录下的 Makefile 文件,如下图所示。

3 驱动添加
完成 以上内容后,进入 Linux 内核目录下执行 make menuconfig 进行内核配置,添加 YT PHY 驱动,如下图所示。

4. 移植关注点分析
a. u-boot 和 Linux 内核 PHY 驱动移植都是基于标准软件框架, u-boot 和 Linux 内核都是通过 PHY ID 来完成 PHY 设备 device 和驱动 driver 的匹配,匹配成功后通过函数(ytphy8511_config)调用完成设备树解析及 PHY 配置操作;

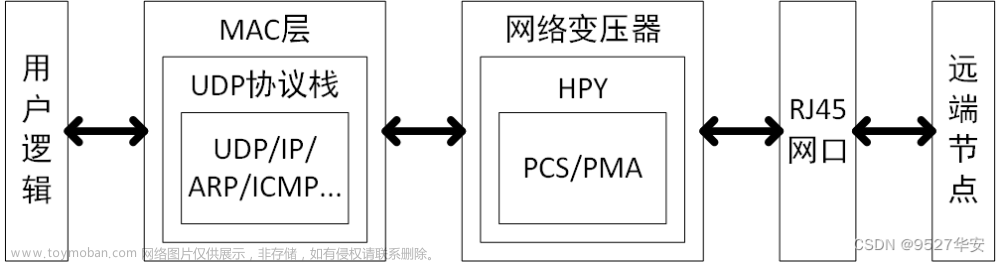
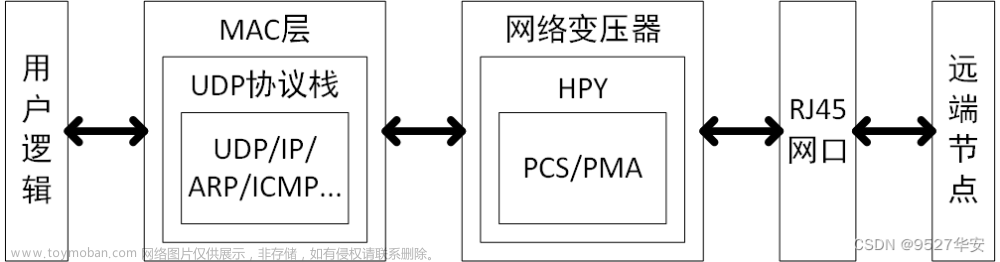
b. u-boot 移植过程中要注意 phy_device->dev(struct udevice *dev,图1所示)不是自身的 udevice 而是 gmac 的设备信息(如图2所示),设备树节点解析时要注意!

图1

图2文章来源:https://www.toymoban.com/news/detail-603958.html
c. 设备树中 gmac、 mdio、 phy 设备节点及属性PS 端有两路 gmac(gmac0、gmac1), gamc 下分别有一路 mdio(mdio0、 mdio1)。网络相关设备树节点配置方法为: root 节点下包含 gmac 节点, gamc 节点包含子节点 mdio,mdio 节点包含子节点 phy,其中 mdio 节点下可包含多个 phy 子节点。文章来源地址https://www.toymoban.com/news/detail-603958.html
到了这里,关于PHY芯片的使用(三)在linux下网络PHY的移植的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!