循迹模式—差速转弯
为什么要差速转弯?
普通循迹模式下,小车转弯是让一个轮子停止,另一个轮子转动,强行带动停下的轮子前进,所以会造成转弯时“一拐一拐的”,显得不平滑;
如果使转弯时外侧轮子速度快,里侧轮子速度慢,在两个轮子的速度差下进行转弯,便会现得平滑很多
程序
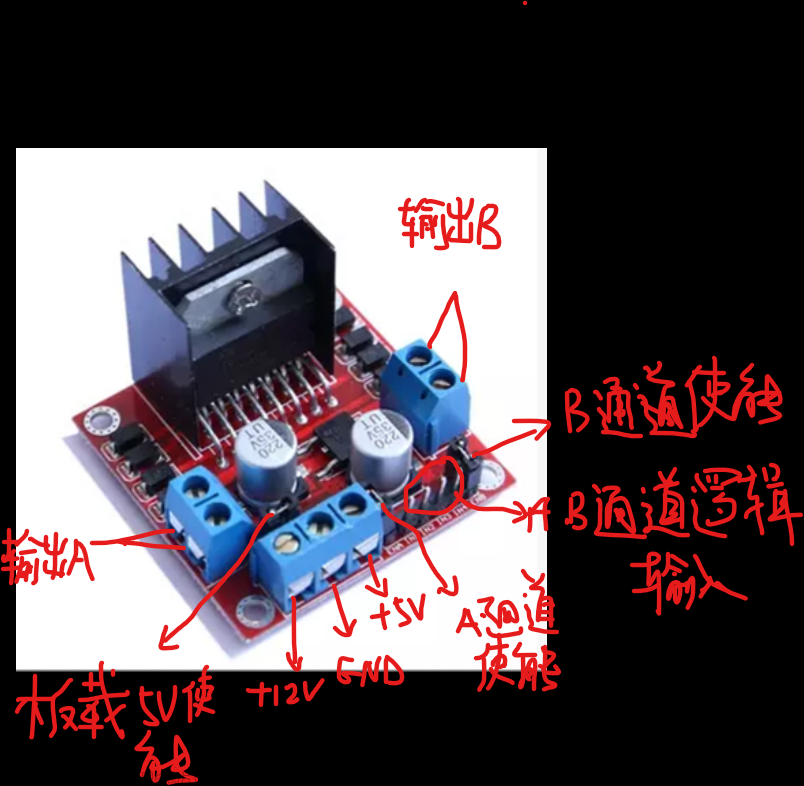
实现差速转弯,主要用到了左右轮PWM调速的功能,把小车PWM调速-左右轮差速调速的定时器初始化和中断处理拿过来使用
程序文件:
1.main.c:主要是对两个红外循迹模块的输出引脚电平进行判断,接着调用电机驱动使小车左右转弯
2.Motor.c:小车前进、后退、左转、右转和停止的函数,被定时器的PWM调速中断处理调用
3.Delay.c:延时函数
4.Timer.c:定时器0和定时器1初始化,以及中断PWM

Timer.c:
#include <REGX52.H>
#include "Motor.h"
#include "Delay.h"
unsigned char CountLeft;
unsigned char SpeedLeft;
unsigned char CountRight;
unsigned char SpeedRight;
/**
* @brief 定时器0初始化函数,左轮PWM控制
* @param 无
* @retval 无
*/
void Timer0Init(void) //0.5毫秒@11.0592MHz
{
TMOD &= 0xF0;
TMOD |= 0x01; //设置定时器模式
TL0 = 0x33; //设置定时初值
TH0 = 0xFE; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
EA = 1; //开启总中断
ET0 = 1; //开启定时器0中断
}
//Timer0中断处理函数,每隔0.5毫秒进入一次中断
void Timer0_Rountine() interrupt 1
{
CountLeft++;
TL0 = 0x33;
TH0 = 0xFE;
if(CountLeft < SpeedLeft)
{
//左轮前进
GoForwardLeft();
}
else
{
//左轮停止
StopLeft();
}
if(CountLeft == 40) //周期长一点,小车调速会更顺滑点
{
CountLeft = 0;
}
}
/**
* @brief 定时器1初始化,右轮PWM调速
* @param 无
* @retval无
*/
void Timer1Init(void) //0.5毫秒@11.0592MHz
{
TMOD &= 0x0F;
TMOD |= 0x10; //设置定时器模式
TL1 = 0x33; //设置定时初值
TH1 = 0xFE; //设置定时初值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
EA = 1; //开启总中断
ET1 = 1; //开启定时器1中断
}
//Timer1中断处理函数,每隔0.5毫秒进入一次中断
void Timer1_Rountine() interrupt 3
{
CountRight++;
TL1 = 0x33;
TH1 = 0xFE;
if(CountRight < SpeedRight)
{
//右轮前进
GoForwardRight();
}
else
{
//右轮停止
StopRight();
}
if(CountRight == 40) //20ms
{
CountRight = 0;
}
}
main.c
如果测试过程中发现小车走直线会偏移,说明左右轮的速度不一样,可以用PWM稍微调整下文章来源:https://www.toymoban.com/news/detail-603999.html
需要注意的是在两个传感器都不反射的情况下,也就是启动的过程中把小车从地面拿起来了,红外没反射回来,如果使用之前的Stop函数,则会出现电流声,这样是个bug,要改为将比较值置0才解决这个问题文章来源地址https://www.toymoban.com/news/detail-603999.html
#include <REGX52.H>
#include "Motor.h"
#include "Delay.h"
#include "Timer.h"
/*
循迹功能-差速
在简单的循迹功能基础上,为了让转弯平滑,左右轮可用PWM差速转弯
1.增加Timer.c,初始化定时器0和定时器1,中断函数中分别对左右轮作PWM调速
*/
//左右红外传感器的信号引脚
sbit LeftSersor = P2^7;
sbit RightSersor = P2^6;
extern unsigned char SpeedLeft;
extern unsigned char SpeedRight;
void main()
{
Timer0Init();
Timer1Init();
while(1)
{
//两个都反射,都亮灯
if(LeftSersor == 0 && RightSersor == 0)
{
SpeedLeft = 40;
SpeedRight = 37; //前进时右轮会快一点,导致不能走直线,PWM调速调低点
}
//左边反射,右边没反射,左亮
if(LeftSersor == 0 && RightSersor == 1)
{
SpeedLeft = 35; //转弯时如果两个轮的差速不够大,那小车会跑出跑道
SpeedRight = 10;
}
//右边反射,左边没反射,右亮
if(LeftSersor == 1 && RightSersor == 0)
{
SpeedLeft = 10;
SpeedRight = 35;
}
//两个都不反射,都灭灯
if(LeftSersor == 1 && RightSersor == 1)
{
/*如果停止写Stop函数的话,运行会异常,因为都不反射的时候停止,
但此时定时器是在工作的,当中断处理函数那边执行时,左右轮想转动,
但main函数又让其停止,小车就会有滋滋的电流响声,改用比较值
SpeeLeft、SpeedRight置0操作则消除这个现象*/
SpeedLeft = 0;
SpeedRight = 0;
}
}
}
到了这里,关于循迹模式-差速转弯的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!