一.MCP4725
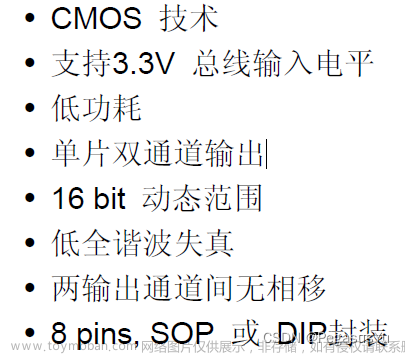
简单总结为下面几个特点。
1路DAC输出
12位分辨率
I2C 接口(标准,快速,高速支持)
供电电压2.7-5.5
内部EEPROM存储设置
I2C地址可配置(A0)(A1、A2内置,默认为‘00’)
二.硬件设计
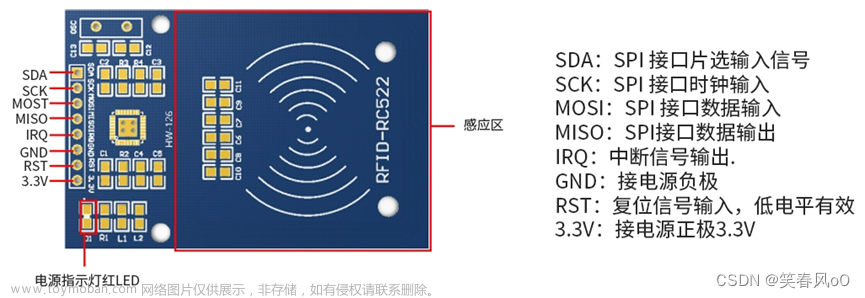
MCP4725的管脚定义如图所示,比较简单
官方的电路图如下
一般上拉电阻选择10K就可以了,后级的比较器看项目需要,可以更换为同相放大器。
三.软件设计
MCP4725的输出电压由下面的公式计算得出
可以理解为VDD除以4096份,我们想要输出相对应的电压只要计算好相对应的份数就可以了。
MCP4725采用I2C接口。写命令如图
MCP4725带一个EEPROM,可以存储上一次输出的电压指令。
快速模式写DAC寄存器
其实第一个字节一般是固定的,如果I2C只连接了一个MCP4725那就是写入0XC2。第二个字节关断模式一般选择为00,接下来就是想要输出的电压分数,比如参考电压为5V,想要输出2.5V就是2048份,也就是0X800。 接下来的写EEPROM和读EEPROM也是一样的操作。就不详细写了
接下来的写EEPROM和读EEPROM也是一样的操作。就不详细写了

代码
H文件
#ifndef __MCP4725_H
#define __mcp4725_H
#include "myiic.h"
#define VREF_5V 5000
void MCP4725_Init(void);
void MCP4725_WriteData_Digital(u16 data);
void MCP4725_WriteData_Voltage(u16 Vout);
#endif
C文件文章来源:https://www.toymoban.com/news/detail-604482.html
#include "MCP4725.h"
#include "delay.h"
//初始化IIC接口
void MCP4725_Init(void)
{
IIC_Init();
}
//使用快速模式写命令写DAC寄存器
void MCP4725_WriteData_Voltage(u16 Vout) //电压单位mV
{
u8 temp;
u16 Dn;
Dn = ( 4096 * Vout) / VREF_5V; //这里的VREF_5V宏定义为5000
temp = (0x0F00 & Dn) >> 8; //12位数据。0000XXXX XXXXXXXX
IIC_Start();
IIC_Send_Byte(0XC2); //器件寻址,器件代吗:1100; 地址位A2,A1,A0为 0 , 0 , 1;-> 1100 0010
IIC_Wait_Ack();
IIC_Send_Byte(temp); //将高8位送到DAC寄存器
IIC_Wait_Ack();
IIC_Send_Byte(Dn); //将低8位送到DAC寄存器
IIC_Wait_Ack();
IIC_Stop();//产生一个停止条件
delay_ms(10);
}
void MCP4725_WriteData_Digital(u16 data) //12位数字量
{
u8 data_H=0,data_L=0;
data_H = ( 0x0F00 & data) >> 8;
data_L = 0X00FF & data ;
IIC_Start();
IIC_Send_Byte(0XC0); //器件寻址,器件代吗:1100; 地址位A2,A1,A0为 0 , 0 , 0;-> 1100 0010
IIC_Wait_Ack();
IIC_Send_Byte(data_H);
IIC_Wait_Ack();
IIC_Send_Byte(data_L);
IIC_Wait_Ack();
IIC_Stop();//产生一个停止条件
delay_ms(10);
}
I2C文件文章来源地址https://www.toymoban.com/news/detail-604482.html
#ifndef __MYIIC_H
#define __MYIIC_H
#include "sys.h"
//IO方向设置
//
//#define SDA_IN() {GPIOL->CRH&=0XFF0FFFFF;GPIOA->CRL|=(u32)8<<12;} //PA5
//#define SDA_OUT() {GPIOL->CRH&=0XFF0FFFFF;GPIOA->CRL|=(u32)3<<12;}
//IO操作函数
#define IIC_SCL PAout(4) //SCL
#define IIC_SDA PAout(5) //SDA
#define READ_SDA PAin(5) //输入SDA
//IIC所有操作函数
void IIC_Init(void); //初始化IIC的IO口
void IIC_Start(void); //发送IIC开始信号
void IIC_Stop(void); //发送IIC停止信号
void IIC_Send_Byte(u8 txd); //IIC发送一个字节
u8 IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
u8 IIC_Wait_Ack(void); //IIC等待ACK信号
void IIC_Ack(void); //IIC发送ACK信号
void IIC_NAck(void); //IIC不发送ACK信号
void SDA_IN(void);
void SDA_OUT(void);
void IIC_Write_One_Byte(u8 daddr,u8 addr,u8 data);
u8 IIC_Read_One_Byte(u8 daddr,u8 addr);
#endif
#include "myiic.h"
#include "delay.h"
//初始化IIC
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE ); //使能GPIOA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5; //PA4 ->SCL; PA5->SDA
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_4|GPIO_Pin_5); //PA4,PA5 输出高,因为IIC空闲状态都是高电平
}
//SDA设置为输入
void SDA_IN (void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
//SDA设置为输出
void SDA_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
//产生IIC起始信号
void IIC_Start(void)
{
SDA_OUT(); //sda线设置为输出
IIC_SDA=1;
IIC_SCL=1;
delay_us(10);
IIC_SDA=0; //START:when CLK is high,DATA change form high to low
delay_us(10);
IIC_SCL=0; //钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void IIC_Stop(void)
{
SDA_OUT();//sda线输出
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(10);
IIC_SCL=1;
IIC_SDA=1;//发送I2C总线结束信号
delay_us(10);
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN(); //SDA设置为输入
IIC_SDA=1;delay_us(2);
IIC_SCL=1;delay_us(2);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;//时钟输出0
return 0;
}
//产生ACK应答
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(5);
IIC_SCL=1;
delay_us(5);
IIC_SCL=0;
}
//不产生ACK应答
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(5);
IIC_SCL=1;
delay_us(5);
IIC_SCL=0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++) //开始准备信号线
{
//IIC_SDA=(txd&0x80)>>7;
if((txd&0x80)>>7)
IIC_SDA=1;
else
IIC_SDA=0;
txd<<=1;
delay_us(5); //对TEA5767这三个延时都是必须的
IIC_SCL=1;
delay_us(5);
IIC_SCL=0;
delay_us(5);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(5);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(4);
}
if (!ack)
IIC_NAck();//发送nACK
else
IIC_Ack(); //发送ACK
return receive;
}
到了这里,关于MCP4725介绍和STM32模拟IC2驱动的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!