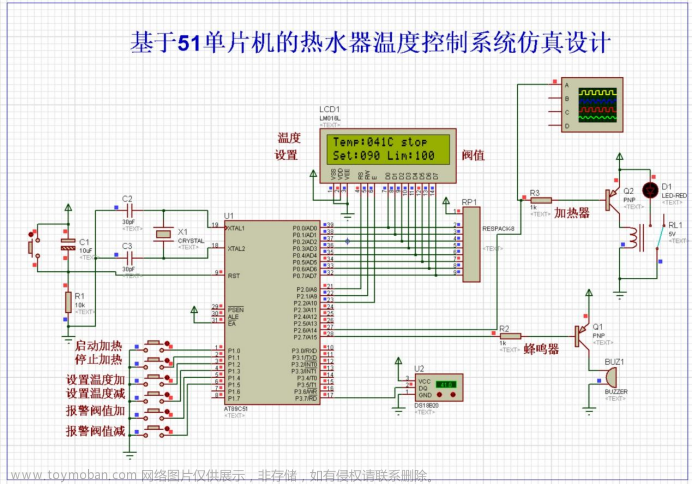
使用STM32写的PID算法温度控制程序示例,该程序通过读取温度传感器的数据,并采用PID控制算法,输出PWM信号来控制加热器的工作,以实现温度的稳定控制。文章来源:https://www.toymoban.com/news/detail-607537.html
#include "stm32f10x.h"
#define TIM_PERIOD (SystemCoreClock / 1000000 - 1) // PWM周期为1us
#define PWM_CHANNEL TIM_OCMode_PWM1
#define PWM_POLARITY TIM_OCPolarity_High
#define KP 1.0 // 比例系数
#define KI 0.1 // 积分系数
#define KD 0.01 // 微分系数
#define PID_INTERVAL 100 // PID计算间隔,单位为毫秒
double setpoint = 50.0; // 目标温度
double temperature = 0; // 当前温度
double output = 0.0; // 控制信号
double error = 0.0; // 偏差
double lastError = 0.0; // 上次偏差
double integral = 0.0; // 积分项
double derivative = 0.0;// 微分项
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
// 计算PID控制信号
void pidCalculate(void) {
static unsigned long lastTime = 0;
unsigned long now = millis();
if (now - lastTime < PID_INTERVAL) {
return;
}
// 读取温度传感器
temperature = readTemperature();
error = setpoint - temperature;
integral += error;
derivative = error - lastError;
output = KP * error + KI * integral + KD * derivative;
lastError = error;
if (output > TIM_PERIOD) {
output = TIM_PERIOD;
}
if (output < 0.0) {
output = 0.0;
}
// 设置PWM信号输出
TIM_OCInitStructure.TIM_Pulse = output;
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
lastTime = now;
}
// 初始化PWM输出
void pwmInit(void) {
TIM_TimeBaseStructure.TIM_Period = TIM_PERIOD;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = PWM_CHANNEL;
TIM_OCInitStructure.TIM_OCPolarity = PWM_POLARITY;
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_Cmd(TIM1, ENABLE);
}
int main(void) {
// 初始化定时器
TIM_DeInit(TIM1);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
// 初始化PWM输出
pwmInit();
while (1) {
pidCalculate();
}
}
// 延时函数
void delay_ms(uint32_t ms) {
if (ms == 0) return;
ms *= (SystemCoreClock / 1000) / 5;
while (ms--) {
__NOP();
}
}
// 获取当前的毫秒数
unsigned long millis(void) {
static uint32_t tick = 0;
static uint32_t lastTick = 0;
tick = SysTick->VAL;
if (tick > lastTick) {
lastTick = tick;
}
return (lastTick * 1000) / SystemCoreClock;
}
// 读取温度传感器
double readTemperature(void) {
// TODO:读取温度传感器的代码
}以上代码基于STM32F10x的单片机实现,使用了定时器来输出PWM信号,以控制加热器的加热功率。同时,该程序还实现了PID算法,并会定时读取温度传感器的数据,计算出控制信号,并更新PWM信号输出的占空比。用户可以根据具体硬件平台和温度传感器的类型,对代码进行适当的修改和调试。文章来源地址https://www.toymoban.com/news/detail-607537.html
到了这里,关于STM32写的PID算法温度控制程序示例的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!