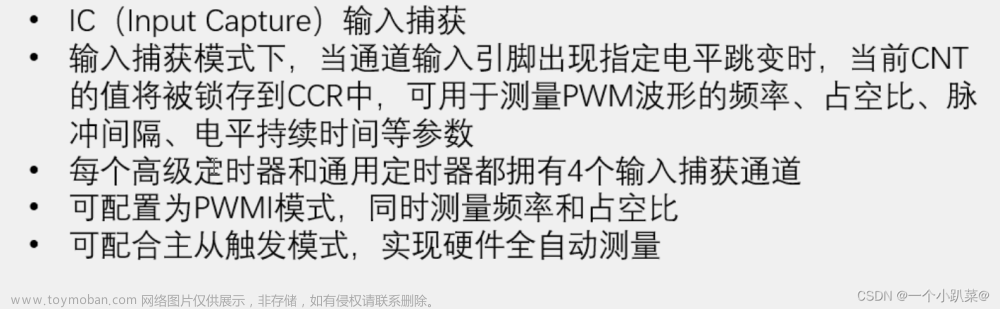
定时器-输入捕获
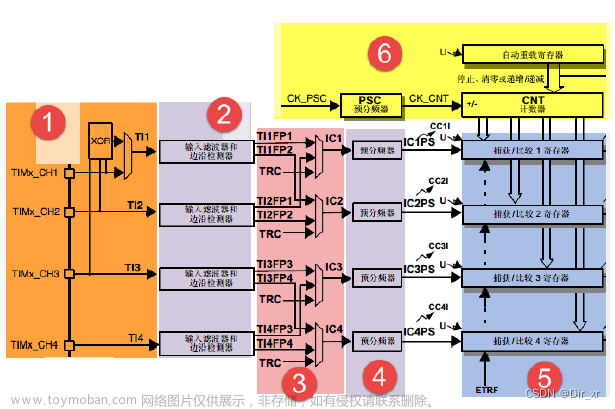
输入捕获工作过程
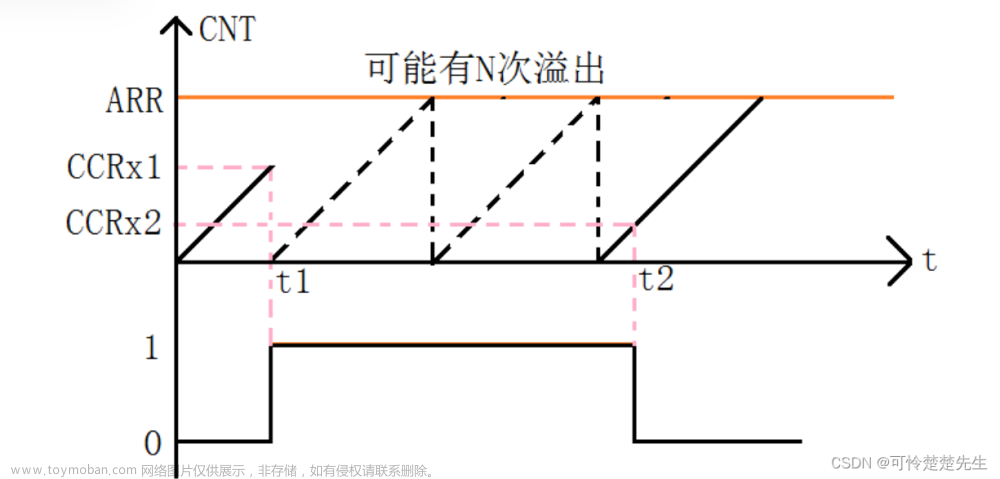
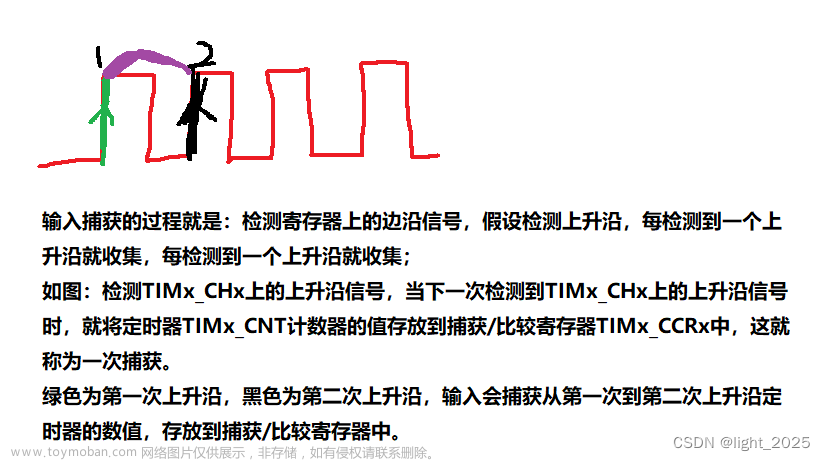
一句话总结工作过程:通过检测TIMx_CHx上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的捕获/比较寄存器(TIMxCCRx)里面,完成一次捕获。
步骤1:设置输入捕获滤波器(通道1为例)

输入捕获1滤波器ICIF[3:0],这个用来设置输入采样频率和数字滤波器长度。其中, fck_INT是定时器的输入频率(TIMxCLK),一般为72Mhz,而 fDTS 则是根据TIMx_CR1的CKD[1:0]的设置来确定的,如果CKD[1:0]设置为00,那么fDTS=fck_INT。N值就是滤波长度,举个简单的例子:假设ICIF[3:0]=0011,并设置IC1映射到通道1上,且为上升沿触发,那么在捕获到上升沿的时候,再以fck_INT的频率,连续采样到8次通道1的电平,如果都是高电平,则说明这是一个有效的触发,就会触发输入捕获中断(如果开启了的话)。这样可以滤除那些高电平脉宽低于8个采样周期的脉冲信号,从而达到滤波的效果。这里,我们不做滤波处理,所以设置ICIF[3:0]=0000,只要采集到上升沿,就触发捕获。
连续采集8次通道1的电平,起滤波的作用
步骤2:设置输入捕获极性(通道1为例)


步骤3:设置输入捕获映射通道(通道1为例)
一般情况下通道1映射到IC1,通道2映射到IC2


步骤四:设置输入捕获分频器(通道1为例)

步骤五:捕获到有效信号可以开启中断

输入捕获通道初始化函数:
void TIM_ICInit(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct);
结构体类型
typedef struct
{
uint16_t TIM_Channel; //捕获通道1-4
uint16_t TIM_ICPolarity; //捕获极性
uint16_t TIM_ICSelection; //映射关系
uint16_t TIM_ICPrescaler; //分频系数
uint16_t TIM_ICFilter; //滤波器
} TIM_ICInitTypeDef;
初始化例子
TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTl;
TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM5_ICInitStructure.TIM_ICFilter = Ox00;
TIM_ICInit(TIM5,&TIM5_ICInitStructure);
通道极性设置独立函数:
void TIM_OCxPolarityConfig(TIM_TypeDef* TIMx,uint16_t TIM_OCPolarity
获取通道捕获值
uint32_t TIM_GetCapture1(TIM_TypeDef* TIMx);
输入捕获的一般配置步骤:
1、初始化定时器和通道对应IO的时钟。
2、初始化IO口,模式为输入: GPIO Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PAO输入
3、初始化定时器ARR, PSC
TIM_TimeBaselnit();
4、初始化输入捕获通道
TIM_ICInit();
5、如果要开启捕获中断
TIM_ITConfig();
NVIC_Init();
6、使能定时器
TIM_Cmd();
7、编写中断服务函数:文章来源:https://www.toymoban.com/news/detail-608425.html
TIMx_IRQHandler();
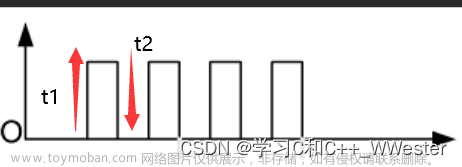
实验目的:测量信号的脉冲宽度

 文章来源地址https://www.toymoban.com/news/detail-608425.html
文章来源地址https://www.toymoban.com/news/detail-608425.html
到了这里,关于STM32定时器-输入捕获的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!