1.实现单通道
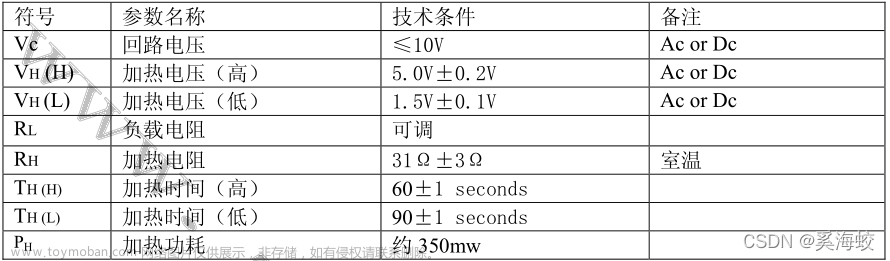
如 pa0 pa1 pa2 温度传感器
1.实现单通道步骤
1):配置RCC GPIOA,UART1,ADC1使能
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
2):配置GPIO
GPIO_InitTypeDef GPIO_InitStruct={
.GPIO_Pin = GPIO_Pin_9 ,//串口发送引脚,方便调试
.GPIO_Mode = GPIO_Mode_AF,
.GPIO_Speed = GPIO_Speed_Level_3,
.GPIO_OType = GPIO_OType_PP,
.GPIO_PuPd = GPIO_PuPd_NOPULL,
};
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_1);//配置9脚位复用
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;//传感器TAM引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AIN;//模拟输入
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_Level_3;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA,&GPIO_InitStruct);
3):配置UART1
USART_InitTypeDef USART_InitStruct={
.USART_BaudRate = 115200,//波特率
.USART_WordLength = USART_WordLength_8b,//数据位 8
.USART_StopBits = USART_StopBits_1,//停止位 1
.USART_Parity = USART_Parity_No,//校验位 无
.USART_Mode = USART_Mode_Rx | USART_Mode_Tx,//rx接收,tx发送
.USART_HardwareFlowControl = USART_HardwareFlowControl_None,//无流控
};
USART_Init(USART1,&USART_InitStruct);
USART_Cmd(USART1,ENABLE);//使能串口
4):配置ADC1
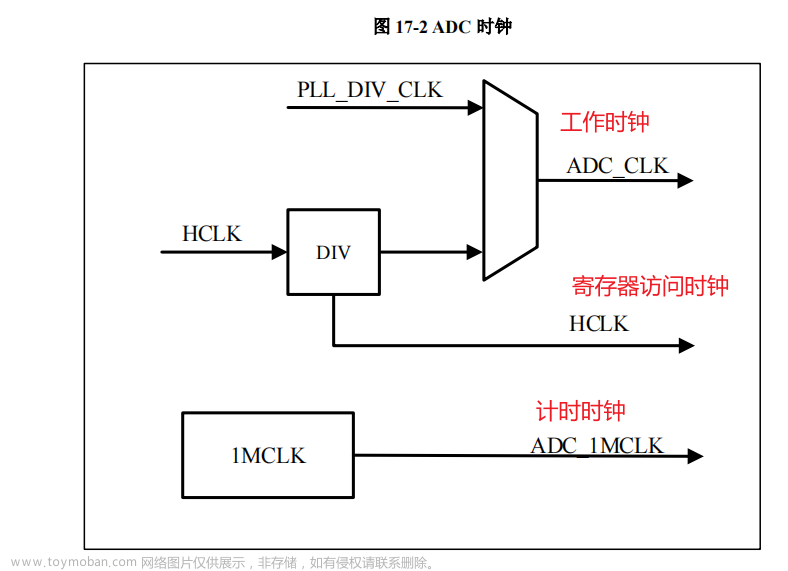
//adc时钟初始化
RCC_ADCCLKConfig(RCC_ADCCLK_PCLK_Div4);
//adc1 初始化
ADC_InitTypeDef ADC_InitStruct={
.ADC_Resolution = ADC_Resolution_12b, //配置数字信号值的分辨率为12位
.ADC_ContinuousConvMode = DISABLE, //配置不要进行持续的模数转换 DISABLE 持续转换 ENABLE
.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None, //启用软件触发,禁止外部启用模数转换
.ADC_DataAlign = ADC_DataAlign_Right, //右对齐
.ADC_ScanDirection = ADC_ScanDirection_Backward, //配置adc扫描方式 向下扫描
};
ADC_Init(ADC1,&ADC_InitStruct);
//校准ADC1
ADC_GetCalibrationFactor(ADC1);
//使能adc1
ADC_Cmd(ADC1,ENABLE);
//等待adc1启用
while(ADC_GetFlagStatus(ADC1,ADC_FLAG_ADEN) == RESET);
//开始校准ADC1 开始转换
ADC_StartOfConversion(ADC1);
完整代码:
串口部分
uart.h
---------------------//分隔符,不要复制
#ifndef __UART_H_
#define __UART_H_
void uart_init(void);
void uart_tx_data(uint16_t a);
void uart_tx_char(char a);
void delay(void);
#endif
--------------------//分隔符,不要复制
uart.c
--------------------//分隔符,不要复制
#include "stm32f0xx.h" // Device header
#include "uart.h"
void uart_init()
{
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct={
.GPIO_Pin = GPIO_Pin_9 ,//| GPIO_Pin_10,
.GPIO_Mode = GPIO_Mode_AF,
.GPIO_Speed = GPIO_Speed_Level_3,
.GPIO_OType = GPIO_OType_PP,
.GPIO_PuPd = GPIO_PuPd_NOPULL,
};
GPIO_Init(GPIOA,&GPIO_InitStruct);
//GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
//GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN;
//GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
//GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_1);
//GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_1);
//UART1_init
USART_InitTypeDef USART_InitStruct={
.USART_BaudRate = 115200,
.USART_WordLength = USART_WordLength_8b,
.USART_StopBits = USART_StopBits_1,
.USART_Parity = USART_Parity_No,
.USART_Mode = USART_Mode_Rx | USART_Mode_Tx,
.USART_HardwareFlowControl = USART_HardwareFlowControl_None,
};
USART_Init(USART1,&USART_InitStruct);
USART_Cmd(USART1,ENABLE);
}
//延时
void delay()
{
int i=0x4C4B40;
while(i--);
}
//串口发送 接收到的ADC采集到的数据
void uart_tx_data(uint16_t a)
{
USART_SendData(USART1,a);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC) == RESET);
}
//串口发送一个字符
void uart_tx_char(char a)
{
USART_SendData(USART1,a);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC) == RESET);
}
---------------------------//分隔符,不要复制
ADC部分
adc.h
-----------------------------------//分隔符,不要复制
#ifndef __ADC_H_
#define __ADC_H_
void adc_init(void);
uint32_t get_val(uint32_t ADC_Channel);
#endif
-----------------------------------//分隔符,不要复制
adc.h
-----------------------------------//分隔符,不要复制
#include "stm32f0xx.h" // Device header
#include "adc.h"
void adc_init(void)
{
//系统时钟初始化 gpioa adc1
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);
//adc时钟初始化
RCC_ADCCLKConfig(RCC_ADCCLK_PCLK_Div4);
//gpioa 初始化
GPIO_InitTypeDef GPIO_InitStruct={
.GPIO_Pin = GPIO_Pin_0,//| GPIO_Pin_1 | GPIO_Pin_2,
.GPIO_Mode = GPIO_Mode_AN,
.GPIO_Speed = GPIO_Speed_Level_3,
.GPIO_PuPd = GPIO_PuPd_NOPULL,
};
GPIO_Init(GPIOA,&GPIO_InitStruct);
//adc1 初始化
ADC_InitTypeDef ADC_InitStruct={
.ADC_Resolution = ADC_Resolution_12b, //配置数字信号值的分辨率为12位
.ADC_ContinuousConvMode = DISABLE, //配置不要进行持续的模数转换 DISABLE 持续转换 ENABLE
.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None, //启用软件触发,禁止外部启用模数转换
.ADC_DataAlign = ADC_DataAlign_Right, //右对齐
.ADC_ScanDirection = ADC_ScanDirection_Backward, //配置adc扫描方式 向下扫描
};
ADC_Init(ADC1,&ADC_InitStruct);
//校准ADC1
ADC_GetCalibrationFactor(ADC1);
//启用adc1
ADC_Cmd(ADC1,ENABLE);
//等待adc1启用
while(ADC_GetFlagStatus(ADC1,ADC_FLAG_ADEN) == RESET);
//开始校准ADC1 开始转换
ADC_StartOfConversion(ADC1);
}
//采集数据 ADC_Channel 填 ADC_Channel_0
uint32_t get_val(uint32_t ADC_Channel)
{
//配置adc1的采样时长
ADC_ChannelConfig(ADC1,ADC_Channel,ADC_SampleTime_239_5Cycles);
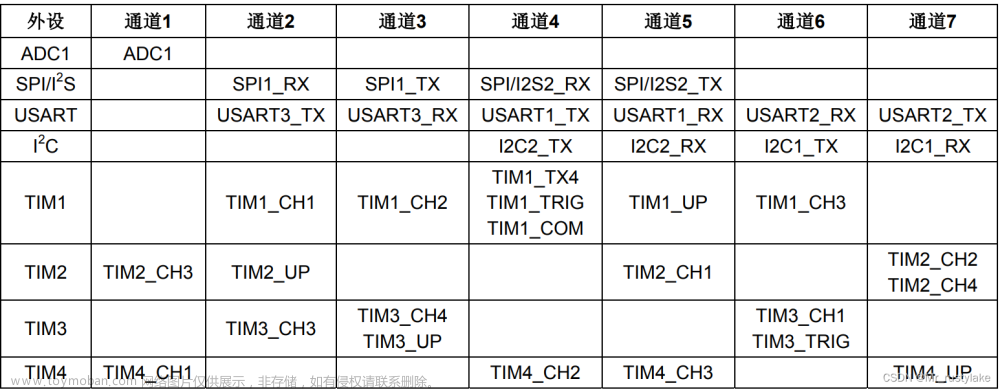
//开启多通道
ADC1->CHSELR=(uint32_t)ADC_Channel;
//开始转换
ADC_StartOfConversion(ADC1);
//等待转换完成
while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC) == RESET);
//返回转换数据
return ADC_GetConversionValue(ADC1);
}
-----------------------------------//分隔符,不要复制主函数
#include "stm32f0xx.h" // Device header
#include "uart.h"
#include "adc.h"
//发送高八位数据
uint16_t get_h_data(uint16_t a)
{
uint16_t h_data;
h_data = (a>>8) & (0xff);
return h_data;
}
//发送低八位数据
uint16_t get_l_data(uint16_t a)
{
uint16_t l_data;
l_data = a & (0xff);
return l_data;
}
int main(void)
{
uint16_t a;
uart_init();
adc_init();
while (1)
{
delay();
// TAM端
a = get_val(ADC_Channel_0);
uart_tx_data(get_h_data(a));
uart_tx_data(get_l_data(a));
delay();
}
}

30为 ‘\0’的16进制 01 B3 为采集到的值(16进制)
文章来源地址https://www.toymoban.com/news/detail-610085.html文章来源:https://www.toymoban.com/news/detail-610085.html
到了这里,关于stm32f030 学习笔记 (1)adc单/双通道采集的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!