读写BKP
思路:
- 使能PWR和BKP时钟,
- 通过PWR函数void PWR_BackupAccessCmd(FunctionalState NewState); 使能BKP RTC的访问,
- 调用BKP的读写函数void BKP_WriteBackupRegister(uint16_t BKP_DR, uint16_t Data);uint16_t BKP_ReadBackupRegister(uint16_t BKP_DR);对BKP进行读写。
没有备用电源,主电源断开后BKP中的数据是维持不了的。读出数据0000
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.H"
#include "Key.h"
#include "OLED.H"
uint16_t ArrayWrite[2]={0x1234,0x5678};
uint16_t ArrayRead[2];
uint8_t keynum;
int main(void)
{
OLED_Init();
Key_Init();
OLED_ShowString(1,1,"W");
OLED_ShowString(2,1,"R");
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP,ENABLE);
PWR_BackupAccessCmd(ENABLE);
while(1)
{
keynum=Key_getNum();
if(keynum == 1)
{
ArrayWrite[0]++;
ArrayWrite[1]++;
BKP_WriteBackupRegister(BKP_DR1,ArrayWrite[0]);
BKP_WriteBackupRegister(BKP_DR2,ArrayWrite[1]);
OLED_ShowHexNum(1,3, ArrayWrite[0],4);
OLED_ShowHexNum(1,8, ArrayWrite[1],4);
}
ArrayRead[0] = BKP_ReadBackupRegister(BKP_DR1);
ArrayRead[1] = BKP_ReadBackupRegister(BKP_DR2);
OLED_ShowHexNum(2,3, ArrayRead[0],4);
OLED_ShowHexNum(2,8, ArrayRead[1],4);
}
}实时时钟
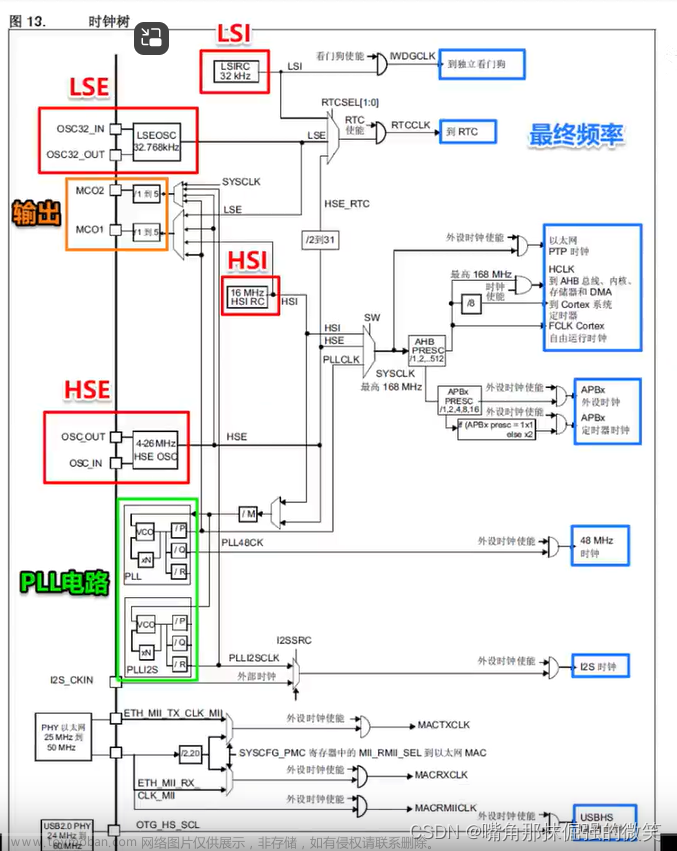
思路(根据RTC基本结构)
- 与读写BKP的步骤1、2一样。
- 开启LSE时钟(默认关闭,使用时需要手动调用函数开启)
- 配置RTCCLK数据选择器,指定LSE为RTCCLK
- 注意事项中第二点调用函数等待同步,第四点调用函数等待写操作结束
- 配置预分频器确保给计数器时钟频率为1hz
- 配置cnt,给RTC初始值,需要闹钟或者中断再进行配置
MyRTC模块
#include "stm32f10x.h" // Device header
#include <time.h>
#include "MYRTC.h"
uint16_t RTC_Time[6]={2023,1,1,23,59,55};
void MyRTC_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP,ENABLE);
PWR_BackupAccessCmd(ENABLE);
if(BKP_ReadBackupRegister(BKP_DR1) != 0xA5A5)//借助BKP的特性,置一个数当作标志位实习复位断电不重置时间
{
RCC_LSEConfig(RCC_LSE_ON);
while(RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET)//调用函数等RCC有个标志位LSERDY置1时时钟启动完成
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForSynchro();
RTC_WaitForLastTask();
//注意事项第三点。函数本身调用了进入配置模式函数,所以不用再每次调用。
RTC_SetPrescaler(32768 - 1); //时钟频率1hz
RTC_WaitForLastTask(); //对RTC寄存器的写操作要等待写操作结束
RTC_SetTime(); //每次复位后调用MyRTC_Init()会将时间重置。
BKP_WriteBackupRegister(BKP_DR1,0XA5A5);
}
else
{
RTC_WaitForSynchro();
RTC_WaitForLastTask();
}
}
void RTC_SetTime(void)
{
time_t time_cnt;
struct tm time_date;
time_date.tm_year=RTC_Time[0] - 1900;
time_date.tm_mon=RTC_Time[1] - 1;
time_date.tm_mday=RTC_Time[2];
time_date.tm_hour=RTC_Time[3];
time_date.tm_min=RTC_Time[4];
time_date.tm_sec=RTC_Time[5];
time_cnt = mktime(&time_date) - 8*60*60;
RTC_SetCounter(time_cnt);
RTC_WaitForLastTask();
}
void RTC_ReadTime(void)
{
time_t time_cnt;
struct tm time_date;
time_cnt=RTC_GetCounter() + 8*60*60;
time_date = *localtime(&time_cnt);
RTC_Time[0] = time_date.tm_year + 1900;
RTC_Time[1] = time_date.tm_mon + 1;
RTC_Time[2] = time_date.tm_mday;
RTC_Time[3] = time_date.tm_hour;
RTC_Time[4] = time_date.tm_min;
RTC_Time[5] = time_date.tm_sec;
}
主函数
int main(void)
{
OLED_Init();
MyRTC_Init();
OLED_ShowString(1,1,"Date:XXXX-XX-XX");
OLED_ShowString(2,1,"Time:XX-XX-XX");
OLED_ShowString(3,1,"CNT:");
OLED_ShowString(4,1,"DIV:");
while(1)
{
RTC_ReadTime();
OLED_ShowNum(1,6,RTC_Time[0],4);
OLED_ShowNum(1,11,RTC_Time[1],2);
OLED_ShowNum(1,14,RTC_Time[2],2);
OLED_ShowNum(2,6,RTC_Time[3],2);
OLED_ShowNum(2,9,RTC_Time[4],2);
OLED_ShowNum(2,12,RTC_Time[5],2);
OLED_ShowNum(3,6,RTC_GetCounter(),10);
//DIV每自减一轮,cnt+1;自减范围32767~0
OLED_ShowNum(4,6,RTC_GetDivider(),10);
}
}
DIV的一个用途:如果要计数到毫秒等,按线性关系。DIV每自减一轮,cnt+1;自减范围32767~0
32767------ 0
0 ----------- 999
用32767-RTC_GetDivider()使范围变为0-32767;
再进行缩放 (32767-RTC_GetDivider())/32767.0 *999;文章来源:https://www.toymoban.com/news/detail-610198.html
这样DIV由原来的32767-0变换为0-999数值表示毫秒。文章来源地址https://www.toymoban.com/news/detail-610198.html
到了这里,关于读写BKP&实时时钟的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!