目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码、操作说明
💥1 概述
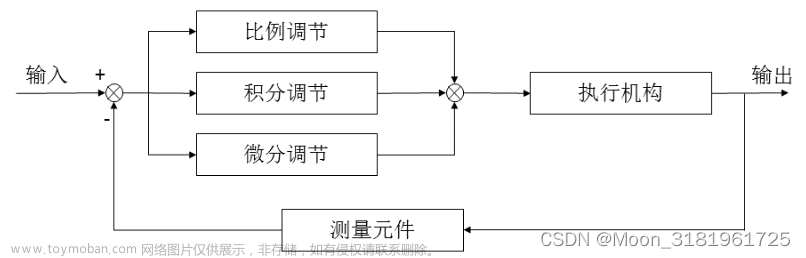
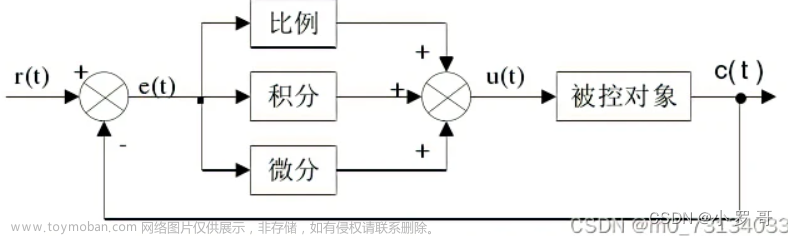
本实验是温度控制的反馈控制应用。特别是,本实验讲解:
手动和自动控制的区别 生成动态数据的
步进测试 拟合动态数据以构建简单的一阶加死区时间 (FOPDT) 模型
从标准调整规则
获取 PID 控制的
参数 调整 PID 控制器以提高性能
稳定性分析
具有第一性原理
的动态建模 动态数据对账
模型预测控制
要使用PID控制器进行台式过程控制实验以保持热敏电阻的温度,按照以下步骤进行:
1. 准备工作
- 确保你有一个能够测量温度并输出电信号的热敏电阻。
- 准备一个PID控制器,可以是硬件设备或者是软件模拟器。
- 确保你有一个控制元件,比如加热器或冷却器,来调节热敏电阻的温度。
2. 设定目标温度
- 确定你要维持的目标温度。这可以是一个固定的温度值,或者是一个可变的设定点,取决于你的实验要求。
3. 连接和配置PID控制器
- 将热敏电阻连接到PID控制器的输入端口,以便测量电阻的温度。
- 配置PID控制器的参数,包括比例系数(Proportional)、积分时间(Integral)、微分时间(Derivative)等,以实现合适的控制效果。
4. 设置反馈控制
- 通过将PID控制器的输出连接到控制元件(加热器或冷却器),使其能够根据热敏电阻的温度误差进行调节。
- 程序中也需要实时读取热敏电阻的温度值,并将其作为反馈信号提供给PID控制器。
5. 调整PID参数
- 根据实验情况和反馈控制效果,逐步调整PID控制器的参数,以获得更好的温度控制性能。
- 可以尝试不同的比例、积分和微分参数组合,并观察温度的稳定性和响应速度。
6. 运行实验
- 启动PID控制器,并记录温度的变化情况。
- 分析实验结果,评估PID控制器的性能,并根据需要进行参数调整和优化。
请注意,PID控制器的配置和调整需要根据具体的实验需求和系统特性进行。在实验过程中,可能需要对控制器参数进行多次调整和优化,以达到期望的控制效果。


📚2 运行结果




部分代码:
% --- Executes just before PID_GUI is made visible.
function PID_GUI_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to PID_GUI (see VARARGIN)
% Choose default command line output for PID_GUI
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes PID_GUI wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% Create xlabel
xlabel(handles.axes1,'Time','FontWeight','bold','FontSize',14,'Color',[0 0 0]);
% Create ylabel
ylabel(handles.axes1,'Temperature (F)','FontWeight','bold','FontSize',14,'Color',[0 0 0]);
% Create title
title(handles.axes1,'Transistor Temperature','FontSize',15,'Color',[0 0 0]);
% Set y limits
ylim(handles.axes1,[50,180]);
% --- Outputs from this function are returned to the command line.
function varargout = PID_GUI_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% --- Executes on button press in start_button.
function start_button_Callback(hObject, eventdata, handles)
% hObject handle to start_button (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on button press in action_button.
function action_button_Callback(hObject, eventdata, handles)
% hObject handle to action_button (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hint: get(hObject,'Value') returns toggle state of action_button
button_state = get(hObject,'Value');
if button_state == get(hObject,'Max')
%Clear Previous Data
cla(handles.axes1);
clearvars time temperature time_out data_out;
%Switch Button Text
set(handles.action_button,'String','Stop');
set(handles.save_text,'Visible','off');
%%Set up COM Port
disp('Initializing Connection')
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]徐娟娟,陈晨,杨洪军.基于PID控制和遗传算法的半导体激光器温控系统[J].沈阳工业大学学报,2017,39(04):449-453.
[2]郝永德,赵欣腾,赵书明.热敏电阻高温特性测试系统[J].仪表技术与传感器,2014(11):79-81.文章来源:https://www.toymoban.com/news/detail-611567.html
[3]徐娟娟,陈晨,杨洪军.基于PID控制和遗传算法的半导体激光器温控系统[J].沈阳工业大学学报,2017,39(04):449-453.文章来源地址https://www.toymoban.com/news/detail-611567.html
🌈4 Matlab代码、操作说明
到了这里,关于【GUI】使用PID控制器进行台式过程控制实验,以保持热敏电阻的温度(Matlab代码实现)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!