目录
0 说明
1 传感器介绍
2 代码说明
2.1 ADC.c
2.2 adc.h
2.3 main.c
0 说明
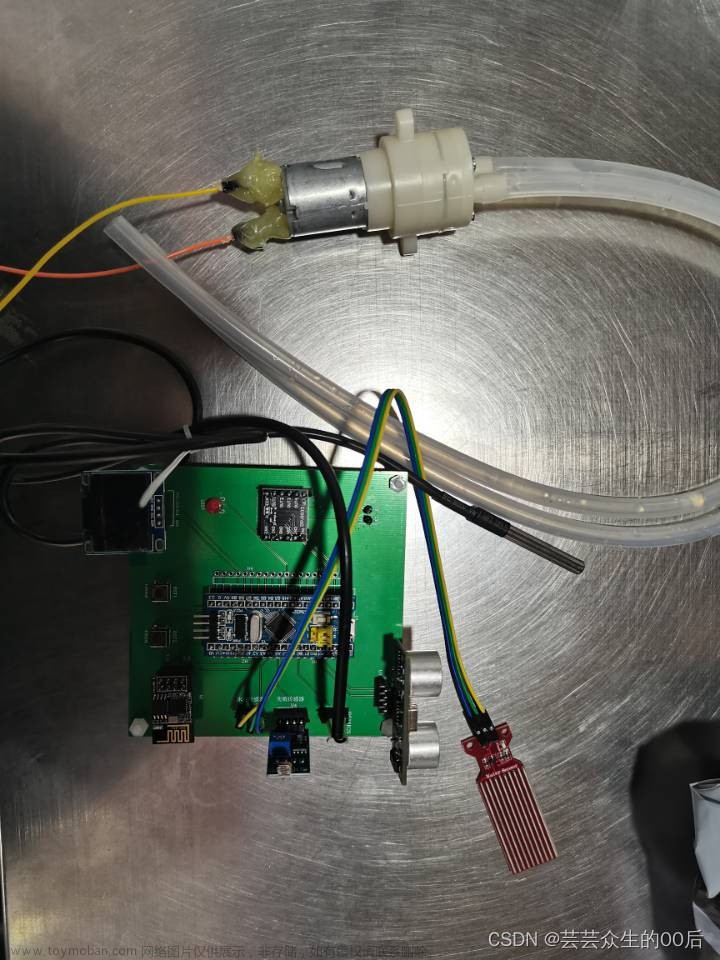
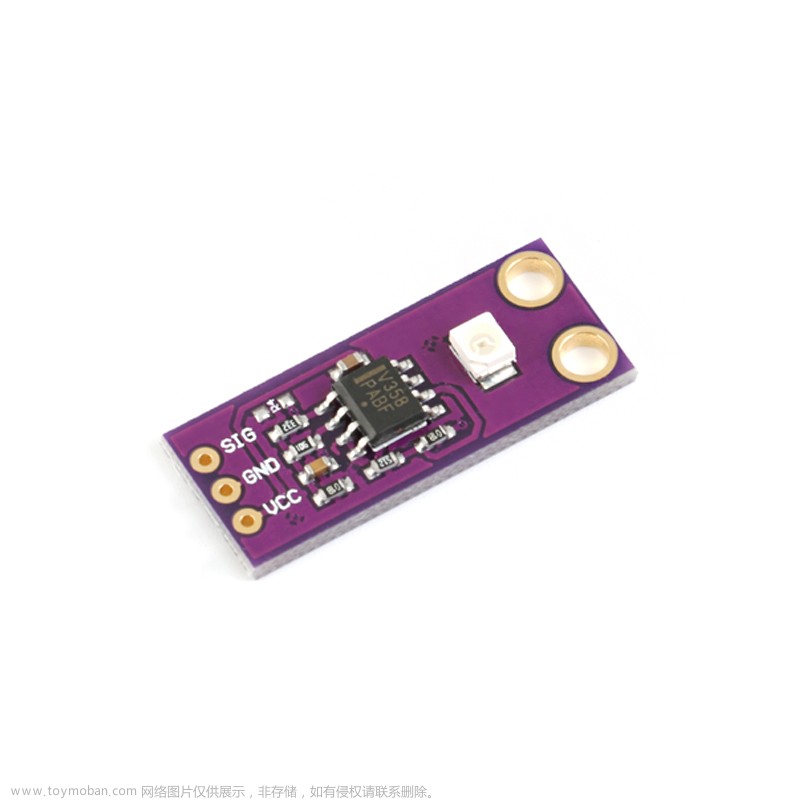
本篇文章主要是说明怎么使用STM32单片机读取风速传感器采集到的数据,读取方式是ADC,并且附带着STM32所需要的全部代码,所使用的风速传感器如下图所示。
附:使用单片机STM32f103系列

1 传感器介绍
该风速传感器使用优质ABS材质、硬度高、柔韧度好、抗压、抗腐蚀、使用寿命长。传感器采用海洋军用的高精度测量风速传感器,与传统产品相比,具有更高精度;是建筑机械、铁路、港口、码头、风力发电、光伏发电、电厂、气象、索道、环境、温室、养殖等领域不可缺少的风速检测装置。用它可以实现设备风速指示数字化及自动化,是相关设备不可缺少的风速检测设备。
本风速传感器采用小型直流有刷电机与三杯式旋转风杯组装而成,其工作原理为,当环境有水平流动风时,旋转风杯能够产生旋转,并带动小型电机产生电压,其电压与旋转速度基本成正比。利用此信号电压,可以对环境风速进行测量。风速传感器输出电压信号和风速的计算公式如下:
2 代码说明
代码主要包括主函数(main.c)、ADC初始化函数(adc.c)函数
2.1 ADC.c
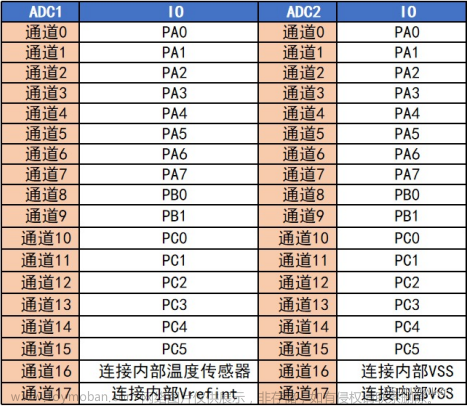
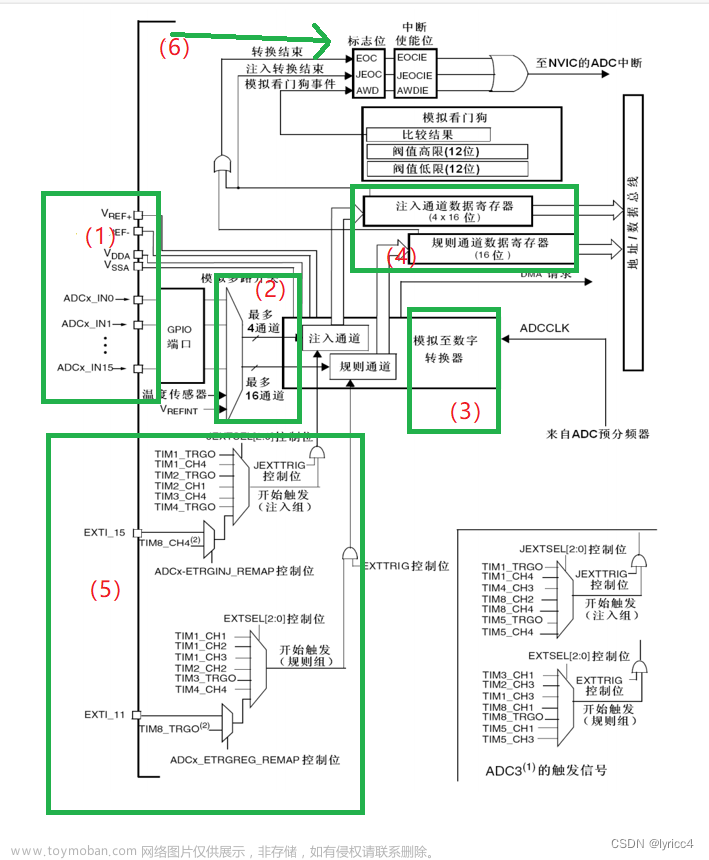
ADC的初始化都差不多,需要注意的是ADC的采集函数
这里采用ADC1通道的PA5进行采集信息
// adc.c
#include "stm32f10x.h"
#include "delay.h"
//初始化ADC
void Adc_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE ); //使能GPIOA通道时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE ); //使能ADC1通道时钟
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //设置ADC分频因子6 72M/6=12,ADC最大时间不能超过14M
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //准备设置PA5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入引脚
GPIO_Init(GPIOA, &GPIO_InitStructure); //设置PA5
ADC_DeInit(ADC1); //复位ADC1,将外设 ADC1 的全部寄存器重设为缺省值
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC工作模式:ADC1和ADC2工作在独立模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //模数转换工作在单通道模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //模数转换工作在单次转换模式
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //转换由软件而不是外部触发启动
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC数据右对齐
ADC_InitStructure.ADC_NbrOfChannel = 1; //顺序进行规则转换的ADC通道的数目
ADC_Init(ADC1, &ADC_InitStructure); //根据ADC_InitStruct中指定的参数初始化外设ADCx的寄存器
ADC_Cmd(ADC1, ENABLE); //使能指定的ADC1
ADC_ResetCalibration(ADC1); //使能复位校准
while(ADC_GetResetCalibrationStatus(ADC1)); //等待复位校准结束
ADC_StartCalibration(ADC1); //开启AD校准
while(ADC_GetCalibrationStatus(ADC1)); //等待校准结束
}
//获得采集结果
int Get_Adc(int ch)
{
ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_239Cycles5 ); //ADC1,ADC通道,采样时间为239.5周期
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的软件转换启动功能
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC )); //等待转换结束
return ADC_GetConversionValue(ADC1); //返回最近一次ADC1规则组的转换结果
}
// 多次得到采集结果并求平均值
int Get_Adc_Average(int ch,int times)
{
int temp_val=0;
char t;
for(t=0;t<times;t++) //循环读取times次
{
temp_val+=Get_Adc(ch); //计算总值
Delay_Ms(5); //延时
}
return temp_val/times; //返回平均值
} 2.2 adc.h
adc.h是根据adc.c的需要进行写的,两个对应就行文章来源:https://www.toymoban.com/news/detail-611890.html
// adc.h
#ifndef __ADC_H
#define __ADC_H
void Adc_Init(void); //初始化ADC
int Get_Adc(int ch) ; //获得ADC结果
int Get_Adc_Average(int ch,int times);//平均多次ADC结果,提高精度
#endif 2.3 main.c
主函数里面主要就是进行函数的初始化和调用文章来源地址https://www.toymoban.com/news/detail-611890.html
#include "stm32f10x.h"
#include "main.h"
#include "delay.h"
#include "usart1.h" // 串口是为了调试方便,可以自己写个串口程序
#include "adc.h"
int main(void)
{
int i; //用于for循环
float wind,twind; //接收风速数据
Delay_Init(); //延时功能初始化
Usart1_Init(9600); //串口1功能初始化,波特率9600
Adc_Init(); //ADC初始化
while(1) //主循环
{
wind = (float)(Get_Adc_Average(5,20))*(3.3/4096);
twind = 27*wind;
u1_printf("twind:%.2f m/s\r\n",twind);
Delay_Ms(1000); //延时
}
}
到了这里,关于STM32-风速传感器(ADC)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!