因为单片机的不可以直接的驱动电机,所以需要在他们之间加上一个电机的驱动模块,之前的文章里面用过L298N电机驱动模块,现在再给大家推荐一个新的电机驱动模块,他比L298N好用许多,而且占用体积小,发热也少。TB6612可以一次驱动两个直流电机,输出PWM也很简单,下面就是通过实验对TB6612电机进行介绍。
一、TB6612电机驱动模块

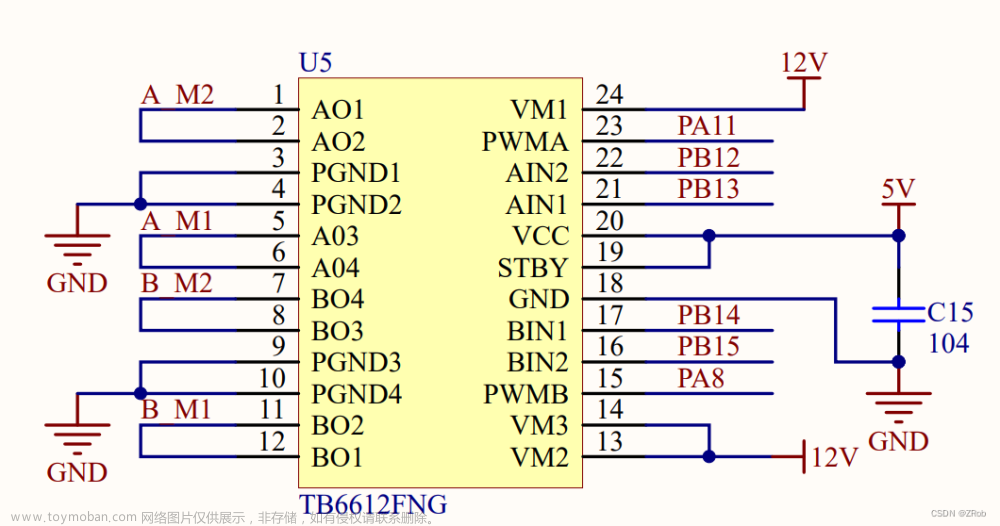
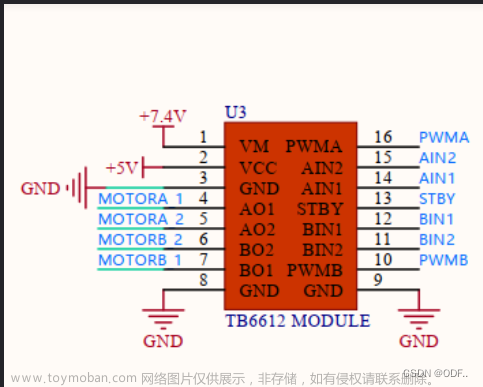
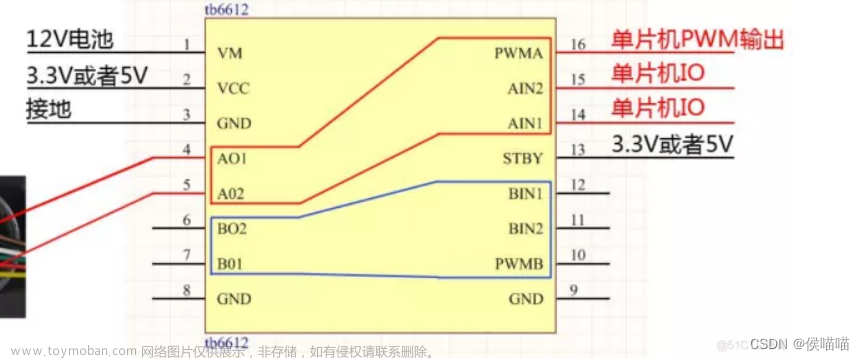
先介绍一下TB6612电机驱动模块的引脚功能,VM:最大接15V电源,我一般使用12V直流电源供电。VCC采用3.3V或者5V供电。板子上的GND就是接地,尽量将三个GND都接上,尽量同时接电源的GND和STM32的GND引脚。STBY:使能端口,加3.3V或者5V电压。AIN1、AIN2、BIN1、BIN2:单片机对驱动模块的输入。AO1、AO2、BO1、BO2:驱动模块对电机的输入。PWMA、PWMB:对A和B口输出PWM,通过PWM来调节电机的转速。
可以通过输入电压的改变来控制电机的正反转,如下图:

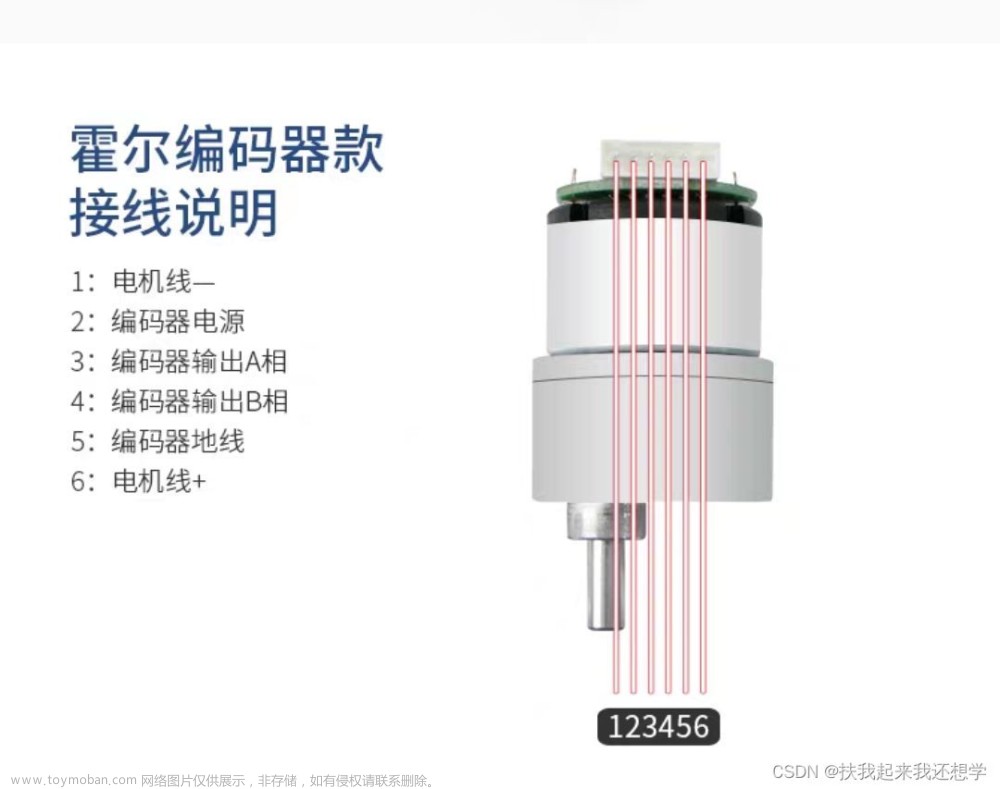
下面采用带编码器的减速直流电机来进行最简单的电机实验:接线如下图:

直接用VCC和GND来带动电机,AIN1接VCC,AIN2接GND,给PWMA接VCC,STBY接VCC,这是代表电机在一个方向全速转动。如果电机正常转动的话,那么各模块就是没有问题的,可以进行下一步实验了,利用GPIO控制电机正反转,就是定义两个独立的GPIO引脚,两个都为输出模式,一个口输出高、一个口输出低,电机就可以根据GPIO的信息正反转起来了,实验简单就不上代码了。
电机可以正反转了,那么如何控制电机的转动速度呢,这里就用到了PWM脉宽调制功能。刚才将PWMA接到了VCC上,代表PWMA一直是高电平,下来将一个IO口定义为PWM功能,通过更改占空比来调节电机的转速。以下是PWM的配置代码后面我们只需要调用TIM_SetCompare1(TIM8,20);这个函数来更改占空比,从而达到调速的功能。将输出PWM的引脚连接在驱动模块的PWMA口即可,之后电机就可以根据设置的PWM来调速转动了。文章来源:https://www.toymoban.com/news/detail-612068.html
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//使能GPIO外设时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM8, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC , ENABLE);
//设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
//初始化定时器ARR,PSC
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化输出比较参数
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM8, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
//使能TIM1
TIM_Cmd(TIM8, ENABLE); //使能TIM1
//MOE 主输出使能pwm
TIM_CtrlPWMOutputs(TIM8,ENABLE);
//CH1预装载使能
TIM_OC1PreloadConfig(TIM8, TIM_OCPreload_Enable);
//使能TIMx在ARR上的预装载寄存器
TIM_ARRPreloadConfig(TIM8, ENABLE);
}利用带编码器的电机,还可以做一个闭环的电机控制系统,利用PID算法控制电机在可控的情况下可以定速的运行,这里还是PID计算出来的值就是PWM要设置的占空比。后面把平衡小车做出来时会分享出来。文章来源地址https://www.toymoban.com/news/detail-612068.html
到了这里,关于stm32+TB6612驱动直流电机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!