sudo /opt/nvidia/jetson-io/jetson-io.py
DISPLAY=:0.0 gst-launch-1.0 nvarguscamerasrc ! 'video/x-raw(memory:NVMM), width=1920, height=1080, format=(string)NV12, framerate=(fraction)20/1' ! nvoverlaysink -eSENSOR_ID=0 # 0 for CAM0 and 1 for CAM1 ports
FRAMERATE=30 # Framerate can go from 2 to 30 for 4032x3040 mode
gst-launch-1.0 nvarguscamerasrc sensor-id=$SENSOR_ID ! "video/x-raw(memory:NVMM),width=4032,height=3040,framerate=$FRAMERATE/1" ! nvvidconv ! "video/x-raw(memory:NVMM),width=1920,height=1080,framerate=$FRAMERATE/1" ! nvoverlaysinkSENSOR_ID=0 # 0 for CAM0 and 1 for CAM1 ports
FRAMERATE=60 # Framerate can go from 2 to 60 for 1920x1080 mode
gst-launch-1.0 nvarguscamerasrc sensor-id=$SENSOR_ID ! "video/x-raw(memory:NVMM),width=1920,height=1080,framerate=$FRAMERATE/1" ! nvvidconv ! nvoverlaysinkDISPLAY=:0.0 gst-launch-1.0 nvarguscamerasrc ! 'video/x-raw(memory:NVMM), width=1920, height=1080, format=(string)NV12, framerate=(fraction)20/1' ! nvoverlaysink -eTIMEOUT 30
DEFAULT primary
MENU TITLE L4T boot options
LABEL primary
MENU LABEL primary kernel
LINUX /boot/Image
INITRD /boot/initrd
APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0
FDT /boot/tegra210-p3448-0000-p3449-0000-b00.dtb
sudo apt-get install --reinstall ./nvidia-l4t-kernel_4.9.201-tegra-32.5.0-20210115145440_arm64.deb
sudo apt-get install --reinstall ./nvidia-l4t-kernel-dtbs_4.9.201-tegra-32.5.0-20210115145440_arm64.deb
gst-launch-1.0 nvarguscamerasrc ! 'video/x-raw(memory:NVMM),width=1280, height=720, framerate=30/1, format=NV12' ! nvoverlaysink
cd ~wget https://github.com/ArduCAM/MIPI_Camera/releases/download/v0.0.3/install_full.sh
chmod +x install_full.sh./install_full.sh -m imx477
ysy@ysy-desktop:~$ gst-launch-1.0 nvarguscamerasrc ! nvoverlaysink
Setting pipeline to PAUSED ...
Pipeline is live and does not need PREROLL ...
Setting pipeline to PLAYING ...
New clock: GstSystemClock
GST_ARGUS: Creating output stream
CONSUMER: Waiting until producer is connected...
GST_ARGUS: Available Sensor modes :
GST_ARGUS: 4032 x 3040 FR = 29.999999 fps Duration = 33333334 ; Analog Gain range min 1.000000, max 22.250000; Exposure Range min 13000, max 683709000;
GST_ARGUS: 3840 x 2160 FR = 29.999999 fps Duration = 33333334 ; Analog Gain range min 1.000000, max 22.250000; Exposure Range min 13000, max 683709000;
GST_ARGUS: 1920 x 1080 FR = 59.999999 fps Duration = 16666667 ; Analog Gain range min 1.000000, max 22.250000; Exposure Range min 13000, max 683709000;
GST_ARGUS: Running with following settings:
Camera index = 0
Camera mode = 2
Output Stream W = 1920 H = 1080
seconds to Run = 0
Frame Rate = 59.999999
GST_ARGUS: Setup Complete, Starting captures for 0 seconds
GST_ARGUS: Starting repeat capture requests.
CONSUMER: Producer has connected; continuing.
nvbuf_utils: dmabuf_fd -1 mapped entry NOT found
nvbuf_utils: Can not get HW buffer from FD... Exiting...
CONSUMER: ERROR OCCURRED
ERROR: from element /GstPipeline:pipeline0/GstNvArgusCameraSrc:nvarguscamerasrc0: CANCELLED
Additional debug info:
Argus Error Status
Execution ended after 0:00:02.183529453
Setting pipeline to PAUSED ...
Setting pipeline to READY ...
GST_ARGUS: Cleaning up
(Argus) Error EndOfFile: Unexpected error in reading socket (in src/rpc/socket/client/ClientSocketManager.cpp, function recvThreadCore(), line 266)
(Argus) Error EndOfFile: Receive worker failure, notifying 2 waiting threads (in src/rpc/socket/client/ClientSocketManager.cpp, function recvThreadCore(), line 340)
(Argus) Error InvalidState: Argus client is exiting with 2 outstanding client threads (in src/rpc/socket/client/ClientSocketManager.cpp, function recvThreadCore(), line 357)
(Argus) Error EndOfFile: Receiving thread terminated with error (in src/rpc/socket/client/ClientSocketManager.cpp, function recvThreadWrapper(), line 368)
(Argus) Error EndOfFile: Client thread received an error from socket (in src/rpc/socket/client/ClientSocketManager.cpp, function send(), line 145)
(Argus) Error EndOfFile: (propagating from src/rpc/socket/client/SocketClientDispatch.cpp, function dispatch(), line 91)
(Argus) Error EndOfFile: Client thread received an error from socket (in src/rpc/socket/client/ClientSocketManager.cpp, function send(), line 145)
(Argus) Error EndOfFile: (propagating from src/rpc/socket/client/SocketClientDispatch.cpp, function dispatch(), line 91)
(Argus) Error InvalidState: Receive thread is not running cannot send. (in src/rpc/socket/client/ClientSocketManager.cpp, function send(), line 96)
(Argus) Error InvalidState: (propagating from src/rpc/socket/client/SocketClientDispatch.cpp, function dispatch(), line 91)
(Argus) Error InvalidState: Receive thread is not running cannot send. (in src/rpc/socket/client/ClientSocketManager.cpp, function send(), line 96)
(Argus) Error InvalidState: (propagating from src/rpc/socket/client/SocketClientDispatch.cpp, function dispatch(), line 91)
(Argus) Error InvalidState: Receive thread is not running cannot send. (in src/rpc/socket/client/ClientSocketManager.cpp, function send(), line 96)
(Argus) Error InvalidState: (propagating from src/rpc/socket/client/SocketClientDispatch.cpp, function dispatch(), line 91)
(Argus) Error InvalidState: Receive thread is not running cannot send. (in src/rpc/socket/client/ClientSocketManager.cpp, function send(), line 96)
(Argus) Error InvalidState: (propagating from src/rpc/socket/client/SocketClientDispatch.cpp, function dispatch(), line 91)
(Argus) Error InvalidState: Receive thread is not running cannot send. (in src/rpc/socket/client/ClientSocketManager.cpp, function send(), line 96)
(Argus) Error InvalidState: (propagating from src/rpc/socket/client/SocketClientDispatch.cpp, function dispatch(), line 91)
Setting pipeline to NULL ...
Freeing pipeline ...
(Argus) Error InvalidState: Receive thread is not running cannot send. (in src/rpc/socket/client/ClientSocketManager.cpp, function send(), line 96)
(Argus) Error InvalidState: (propagating from src/rpc/socket/client/SocketClientDispatch.cpp, function dispatch(), line 91)
TIMEOUT 30
DEFAULT primary
MENU TITLE L4T boot options
LABEL primary
MENU LABEL primary kernel
LINUX /boot/Image
INITRD /boot/initrd
APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0
FDT /boot/tegra210-p3448-0000-p3449-0000-b00.dtb要在Jetson Nano上使用IMX477-160 12.3MP相机,您需要执行以下步骤:
-
将相机连接到Jetson Nano的CSI接口。确保连接正确,电源也已连接。
-
确保您的Jetson Nano系统已更新到最新版本。您可以使用以下命令检查并更新系统:
$ sudo apt-get update
$ sudo apt-get upgrade
3. 安装适当的驱动程序和软件包。要使用IMX477-160相机,您需要安装GStreamer和v4l-utils软件包。您可以使用以下命令安装它们:
$ sudo apt-get install gstreamer1.0-tools gstreamer1.0-plugins-base \
gstreamer1.0-plugins-good gstreamer1.0-plugins-bad v4l-utils
4.检查相机是否被识别。您可以使用以下命令检查相机是否已正确识别:
$ v4l2-ctl --list-devices
如果相机已正确识别,您应该能够看到类似以下内容的输出:
vi-output, imx477 (platform:54080000.vi:0):
/dev/video0
5.配置相机参数。您可以使用以下命令查看相机支持的参数:
$ v4l2-ctl --list-ctrls
您可以使用以下命令设置相机参数:
$ v4l2-ctl -c <control>=<value>
例如,要设置帧速率为30fps:
$ v4l2-ctl -c frame_rate=30
6.使用GStreamer捕获相机图像。您可以使用以下命令捕获相机图像并在屏幕上显示:文章来源:https://www.toymoban.com/news/detail-613686.html
$ gst-launch-1.0 nvarguscamerasrc ! 'video/x-raw(memory:NVMM), width=(int)1920, height=(int)1080, format=(string)NV12, framerate=(fraction)30/1' ! nvvidconv ! 'video/x-raw, width=(int)640, height=(int)480' ! nvvidconv ! nvegltransform ! nveglglessink -e
这将启动GStreamer管道,捕获相机图像并在屏幕上显示。您可以根据需要更改图像的分辨率和帧速率。文章来源地址https://www.toymoban.com/news/detail-613686.html
cd ~wget https://github.com/ArduCAM/MIPI_Camera/releases/download/v0.0.3/install_full.sh
chmod +x install_full.sh./install_full.sh -m imx477
输入 y 重新启动电路板。使用以下命令检查相机是否被正确识别。
ls /dev/video0
https://github.com/JetsonHacksNano/CSI-Camera/blob/master/simple_camera.py
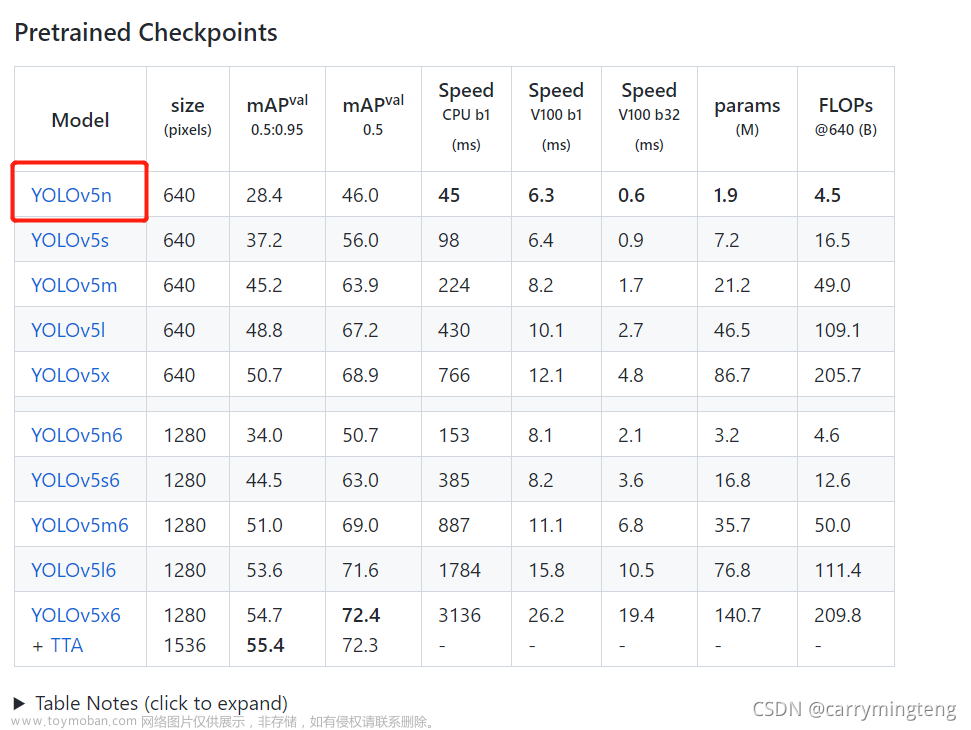
git clone https://github.com/amirhosseinh77/JetsonYolo.git
cd weightswget https://github.com/ultralytics/yolov5/releases/download/v5.0/yolov5s.pt
python3 JetsonYolo.pygst-launch-1.0 nvarguscamerasrc ! 'video/x-raw(memory:NVMM),width=1280, height=720, framerate=120/1, format=NV12' ! nvvidconv flip-method=0 ! 'video/x-raw,width=1280, height=720' ! videoconvert ! 'video/x-raw,format=(string)BGR' ! videoconvert ! 'video/x-raw,format=(string)RGB' ! ximagesink
请确保已安装ximagesink,如果没有,请使用以下命令进行安装:
sudo apt-get install -y x11-apps
import cv2
cap = cv2.VideoCapture(0) # 0表示第一个摄像头,可以尝试其他数字来使用不同的摄像头
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640) # 设置摄像头图像宽度
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480) # 设置摄像头图像高度
while(True):
# 逐帧读取摄像头图像
ret, frame = cap.read()
# 显示摄像头图像
cv2.imshow('USB Camera',frame)
# 按'q'键退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放摄像头并关闭窗口
cap.release()
cv2.destroyAllWindows()
ysy@ysy-desktop:~$ nvgstcapture-1.0 --orientation=2
Encoder null, cannot set bitrate!
Encoder Profile = High
Supported resolutions in case of ARGUS Camera
(2) : 640x480
(3) : 1280x720
(4) : 1920x1080
(5) : 2104x1560
(6) : 2592x1944
(7) : 2616x1472
(8) : 3840x2160
(9) : 3896x2192
(10): 4208x3120
(11): 5632x3168
(12): 5632x4224
Runtime ARGUS Camera Commands:
Help : 'h'
Quit : 'q'
Set Capture Mode:
mo:<val>
(1): image
(2): video
Get Capture Mode:
gmo
Set sensor orientation:
so:<val>
(0): none
(1): Rotate counter-clockwise 90 degrees
(2): Rotate 180 degrees
(3): Rotate clockwise 90 degrees
Get sensor orientation:
gso
Set sensor mode:
smo:<val> e.g., smo:1
Get sensor mode:
gsmo
Set Whitebalance Mode:
wb:<val>
(0): off
(1): auto
(2): incandescent
(3): fluorescent
(4): warm-fluorescent
(5): daylight
(6): cloudy-daylight
(7): twilight
(8): shade
(9): manual
Get Whitebalance Mode:
gwb
Set Saturation (0 to 2):
st:<val> e.g., st:1.25
Get Saturation:
gst
Set Exposure Compensation (-2 to 2):
ec:<val> e.g., ec:-2
Get Exposure Compensation:
gec
Set Auto Whitebalance Lock:
awbl:<val> e.g., awbl:0
Get Auto Whitebalance Lock:
awbl
Set Auto Exposure Lock:
ael:<val> e.g., ael:0
Get Auto Exposure Lock:
gael
Set TNR Mode:
tnrm:<val> e.g., tnrm:1
(0): OFF
(1): FAST
(2): HIGH QUALITY
Get TNR Mode:
gtnrm
Set TNR Strength (-1 to 1):
tnrs:<val> e.g., tnrs:0.5
Get TNR Strength:
gtnrs
Set EE Mode:
eem:<val> e.g., eem:1
(0): OFF
(1): FAST
(2): HIGH QUALITY
Get EE Mode:
geem
Set EE Strength (-1 to 1):
ees:<val> e.g., ees:0.5
Get EE Strength:
gees
Set Auto Exposure Anti-Banding (0 to 3):
aeab:<val> e.g., aeab:2
(0): OFF
(1): MODE AUTO
(2): MODE 50HZ
(3): MODE 60HZ
Get Auto Exposure Anti-Banding:
gaeab
Set Gain Range:
gr:<val><space><val> e.g., gr:1 16
Get Gain Range:
ggr
Set Exposure Time Range:
etr:<val><space><val> e.g., etr:34000 35000
Get Exposure Time Range:
getr
Set ISP Digital Gain Range:
dgr:<val><space><val> e.g., dgr:2 152
Get ISP Digital Gain Range:
gdgr
Capture: enter 'j' OR
followed by a timer (e.g., jx5000, capture after 5 seconds) OR
followed by multishot count (e.g., j:6, capture 6 images)
timer/multihot values are optional, capture defaults to single shot with timer=0s
Start Recording : enter '1'
Stop Recording : enter '0'
Video snapshot : enter '2' (While recording video)
Get Preview Resolution:
gpcr
Get Image Capture Resolution:
gicr
Get Video Capture Resolution:
gvcr
Runtime encoder configuration options:
Set Encoding Bit-rate(in bytes):
br:<val> e.g., br:4000000
Get Encoding Bit-rate(in bytes):
gbr
Set Encoding Profile(only for H.264):
ep:<val> e.g., ep:1
(0): Baseline
(1): Main
(2): High
Get Encoding Profile(only for H.264):
gep
Force IDR Frame on video Encoder(only for H.264):
Enter 'f'
bitrate = 4000000
Encoder Profile = High
Encoder control-rate = 1
Encoder EnableTwopassCBR = 0
Opening in BLOCKING MODE
** Message: 00:22:07.568: <main:4670> iterating capture loop ....
NvMMLiteOpen : Block : BlockType = 4
===== NVMEDIA: NVENC =====
NvMMLiteBlockCreate : Block : BlockType = 4
GST_ARGUS: Creating output stream
CONSUMER: Waiting until producer is connected...
GST_ARGUS: Available Sensor modes :
GST_ARGUS: 4032 x 3040 FR = 29.999999 fps Duration = 33333334 ; Analog Gain range min 1.000000, max 22.250000; Exposure Range min 13000, max 683709000;
GST_ARGUS: 1920 x 1080 FR = 59.999999 fps Duration = 16666667 ; Analog Gain range min 1.000000, max 22.250000; Exposure Range min 13000, max 683709000;
GST_ARGUS: 2592 x 1944 FR = 29.999999 fps Duration = 33333334 ; Analog Gain range min 1.000000, max 22.250000; Exposure Range min 13000, max 683709000;
GST_ARGUS: 2560 x 1440 FR = 40.000000 fps Duration = 25000000 ; Analog Gain range min 1.000000, max 22.250000; Exposure Range min 13000, max 683709000;
GST_ARGUS: Running with following settings:
Camera index = 0
Camera mode = 1
Output Stream W = 1920 H = 1080
seconds to Run = 0
Frame Rate = 59.999999
GST_ARGUS: Setup Complete, Starting captures for 0 seconds
GST_ARGUS: Starting repeat capture requests.
CONSUMER: Producer has connected; continuing.
到了这里,关于IMX477-160 12.3MP Camera在jetson nano上配置调用的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!